
超功能機器人如何凈化污水,解除“鉛”夫所指的罵名?
2016-04-20 16:02:50
作者:本網整理 來源:網絡
分享至:



插圖為石墨烯氧化物微型機器人(簡稱GOx-microbots)自行吸收廢水中的鉛
一項新的研究表明,成千上萬比人類頭發寬度還小的微型機器人,可以吸收、去除工業廢水中的有毒重金屬.研究人員表示這種微型機器人能夠每小時去除污水中95%的鉛,并且多次循環使用,這或許可以成為一種更經濟有效去除重金屬的方法.
當今社會中電池和電子產品的制造,以及采礦和電鍍這類工業活動導致了水資源的重金屬污染.這些重金屬主要包括鉛、砷、汞、鎘、鉻,它們對生物體和環境構成了極大地安全隱患.在不產生額外的污染的前提下,鎖定并去除污染物,這將會是對生態系統修復極為有利的研究方向,近期Diana Vilela 等研究人員在《Nano Letters》發表了一篇有關微型機器人除鉛的論文.
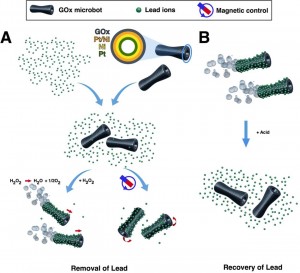
在論文中,研究人員特別關注一種能從廢水吸除鉛的具有三功能層的管狀微型機器人.這種微型機器人的結構主要有:外層是石墨烯氧化層,可以直接吸附水中的鉛.中間層是鎳,為了使微型機器人呈現鐵磁性,從而在工作時通過外部磁場調控他們的運動方向.內層是鉑,為微型機器人在水中自我驅動提供動力.當把過氧化氫添加到廢水中時,鉑將過氧化氫分解為水和氧氣的微氣泡,并從微型機器人后側將微氣泡噴出,以此推動自身前進.
當微型機器人吸附完鉛之后,用磁場引導他們離開污水并聚集在一起.然后將微型機器人放在酸性溶液中使他們與鉛離子分離.分離得到的鉛留待日后回收,循環利用.與鉛離子分離后的微型機器人還可以再次利用.
研究人員表示,未來還可以嘗試使用微型機器人來處理其他污染物,并朝著降低制造成本與大批量生產的方向前進.機器人自我運動能力與功能層的組合也為類似的設計提供了很好的思路,例如藥物輸送以及傳感領域的應用.
acs.nanolett
圖1:GOx-microbots進行鉛凈化與回收的方案.(A)圖表示凈化污水的GOx-microbots是由電沉積的納米層的石墨烯氧化物(氣態氧)外層,Pt /鎳層,鎳磁中層,Pt催化內層組成.鉛離子的凈化策略可以由兩種不同的技術: GOx-microbots在過氧化氫中的自航或在外部旋轉磁場中的引航.(B)圖表示GOx-microbots在酸性介質中與鉛離子分離.
該研究成果近期發表在Nano Letters
論文鏈接:http://pubs.acs.org/doi/abs/10.1021/acs.nanolett.6b00768
更多關于材料方面、材料腐蝕控制、材料科普等方面的國內外最新動態,我們網站會不斷更新。希望大家一直關注中國腐蝕與防護網http://www.ecorr.org
責任編輯:周婭
《中國腐蝕與防護網電子期刊》征訂啟事
投稿聯系:編輯部
電話:010-62313558-801
郵箱:ecorr_org@163.com
中國腐蝕與防護網官方 QQ群:140808414
免責聲明:本網站所轉載的文字、圖片與視頻資料版權歸原創作者所有,如果涉及侵權,請第一時間聯系本網刪除。
相關文章

官方微信
《腐蝕與防護網電子期刊》征訂啟事
- 投稿聯系:編輯部
- 電話:010-62316606-806
- 郵箱:fsfhzy666@163.com
- 腐蝕與防護網官方QQ群:140808414
點擊排行
PPT新聞

“海洋金屬”——鈦合金在艦船的
點擊數:8135

腐蝕與“海上絲綢之路”
點擊數:6475