
空間分辨技術在金屬腐蝕原位監測中的應用
2020-12-23 15:40:57
作者:趙鵬雄,武瑋,淡勇 來源:中國腐蝕與防護學報
分享至:


摘要 綜述了腐蝕領域幾種經典的空間分辨技術,并詳細探討了每一種技術的工作原理、優缺點及其在金屬腐蝕原位監測領域的應用現狀和發展前景。
關鍵詞: 金屬腐蝕; 空間分辨技術; 原位
Abstract
Corrosion is one of the main causes of metal material failure. In corrosion research, it is difficult to obtain accurate information on the corrosion evolution. The development of spatial-resolution technology enables the in-situ observation of metal corrosion processes to be realized. By combining the spatial-resolution technology and electrochemical techniques, more microscopic metal corrosion information can be obtained, which facilitates more accurate acquisition of corrosion information and provides reliable support for the illustration of corrosion mechanism. This paper reviews several classical spatial-resolution techniques in the field of corrosion in terms their working principle, advantages and disadvantages etc. The industrial CCD camera, digital holographic surface imaging technology, X-ray computed tomography, optical microscope, scanning electron microscope, atomic force microscope and transmission electron microscope are introduced. The application status and development prospects of each technology in the field of in-situ monitoring of metal corrosion are discussed. Finally, these spatial-resolution techniques are compared and corresponding recommendations for use are proposed in the review.
Keywords: metal corrosion; spatial-resolved technology; in-situ
自金屬材料問世以來,因其良好的綜合性能在各個領域都得到了廣泛運用,但隨之而來的是一系列嚴重的腐蝕問題。每年都有大量的事故是因金屬材料發生腐蝕失效而導致的,造成了巨大的損失[1-4]。因此,對金屬腐蝕過程進行原位觀測,研究其發生的過程及機理尤為重要。相應的,各種腐蝕監測手段也應運而生,主要分為原位和非原位兩種。
在金屬腐蝕行為研究中,原位監測技術因其可實時獲得腐蝕過程中的有效信息而被廣泛地使用。電化學方法是目前很常用的一種原位監測手段。在早期,傳統的電化學技術,如電阻法、弱極化曲線法、電化學阻抗譜 (EIS) 和電化學噪聲技術 (EN) 等被用于測量金屬腐蝕過程中的電化學信號而獲取腐蝕信息[5-9]。但其測量的只是宏觀的電化學信號,無法表征微區的腐蝕特性。因此,微區電化學測量技術應運而生,主要有掃描振動電極技術 (SVET)、掃描Kelvin探針技術 (SKP) 和陣列參比電極技術等[10-13]。
電化學技術作為一種常用的金屬腐蝕原位檢測手段,能夠獲得腐蝕過程中豐富的電化學信息,但其缺乏空間分辨能力,無法進行表面形貌表征,無法實時提供金屬腐蝕過程全面圖像。基于此,本文介紹了幾種在金屬腐蝕原位監測領域常用的空間分辨技術,探討了工業CCD相機、數字全息表面成像技術、X射線計算機斷層掃描技術、光學顯微鏡 (OM)、掃描電子顯微鏡 (SEM)、原子力顯微鏡 (AFM) 和透射電子顯微鏡 (TEM) 在金屬腐蝕原位監測領域的應用現狀。
1 空間分辨技術
近幾十年來,隨著人們對金屬材料腐蝕問題關注度的不斷提高,越來越多的科研人員致力于金屬腐蝕和防護問題的研究,并取得了很大的進展。但是,多數研究工作主要著力于對腐蝕結果進行表征,而缺乏對腐蝕演化過程中相關信息的獲取。腐蝕演化過程涉及到很長的時間,其中包含的腐蝕信息對腐蝕機理的探究至關重要,目前大多數研究人員只是通過電化學方法結合腐蝕形貌及產物分析技術對腐蝕過程進行跟蹤監測,忽略了腐蝕過程中金屬表面形貌及產物的變化。空間分辨技術的應用能夠在金屬腐蝕原位研究中關注金屬表面不同時空尺度下的變化過程,而與電化學技術的聯合使用能對腐蝕過程進行更加完整充分的研究,進而為腐蝕機理和防腐方法的探究提供新的思路。
1.1 工業相機
工業相機是工業應用中將光信號轉變成為電信號的一種光學儀器,它具有圖像穩定性高、傳輸能力高和抗干擾能力強等特點。目前常用的工業相機大部分都是基于電荷耦合器件 (CCD) 或互補金屬氧化物半導體 (CMOS) 芯片的相機[14]。
CCD是目前機器視覺最為常用的圖像傳感器,它用電荷作為信號的載體,具有壽命長、性能穩定、響應速度快、分辨率高等優點[15]。將工業CCD相機應用到金屬腐蝕原位監測領域可以在線實時觀察腐蝕過程中金屬表面形貌的變化。而且,由于其重量輕、體積小,可以在進行應力腐蝕開裂和腐蝕疲勞等實驗時與相應的大型設備聯用,能夠獲得更細致的腐蝕過程信息。
Zhang等[16]采用慢應變速率拉伸實驗方法 (SSRT) 和CCD相機動態裂紋觀察系統,研究了水溶液中金屬陽離子對敏化304不銹鋼的晶間應力腐蝕開裂 (IGSCC) 的抑制作用。使用CCD照相機系統通過由聚甲基丙烯酸甲酯制成的透明窗監測樣品表面,原位觀察了SCC裂紋萌生和擴展的全過程,明確了實驗溶液中金屬陽離子濃度的增加導致了裂紋萌生時間的增加并降低了裂紋萌生平均頻率,但對裂紋的擴展過程影響很小。
Kamaya等[17]采用原位CCD裂紋觀察系統監測并記錄了敏化304不銹鋼在Na2SO4溶液中恒載SCC實驗過程中的開裂情況,通過圖像處理確定了試樣表面裂紋數量、裂紋長度和裂紋面積之和隨時間的變化情況。認為與0.5Sy (Sy為屈服強度) 和1.3Sy相比,施加0.8Sy的應力會產生相對較多的裂紋。
將CCD相機與電化學等手段結合在一起可以同時獲得更全面的腐蝕信息,從不同角度分析腐蝕過程。Kovac等[18]使用電化學噪聲、數字成像、聲發射和延伸率測量4種手段監測了硫代硫酸鈉水溶液中敏化304不銹鋼受恒定載荷時的晶間應力腐蝕開裂行為。通過CCD光學相機監測標距長度的一部分,然后通過數字圖像相關性進行分析,可靠地監測了IGSCC擴展以及試樣的最終斷裂。這種通過不同技術獲得相關信號并進行對比分析,為IGSCC擴展過程提供了一些新的見解。Bolivar等[19]應用數字圖像相關 (DIC)、聲發射和電化學噪聲測量來研究在連四硫酸鹽溶液中合金600上的多個晶間腐蝕裂紋的擴展情況,其裝置示意圖如圖1所示。用CCD相機觀察樣品表面并成功檢測到長度超過55 μm,開口為0.45 μm的裂紋,裂紋擴展的原位圖像如圖2所示。認為裂紋分為起始裂紋、活躍裂紋和休眠裂紋幾種類型,其中活躍裂紋占較大多數。
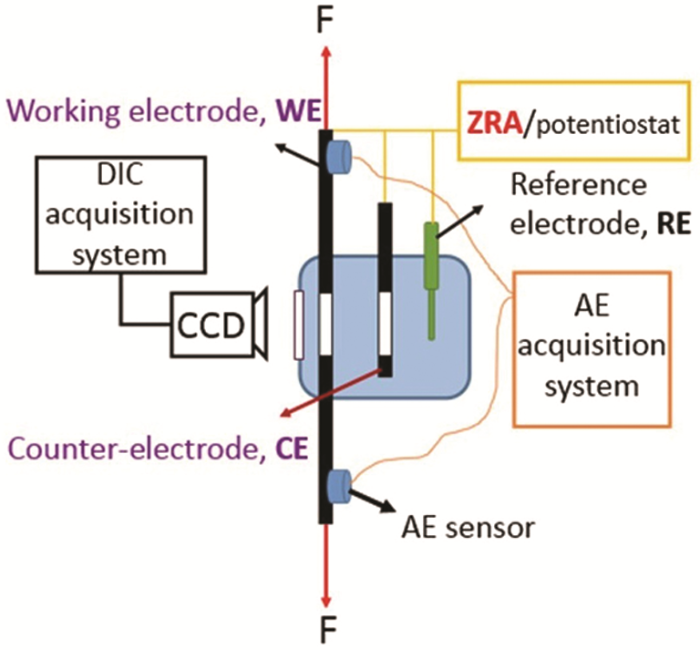
圖1 數字圖像相關與電化學技術原位監測裝置示意圖[19]
Fig.1 In-situ monitoring device of DIC and electrochem-ical technology[19]
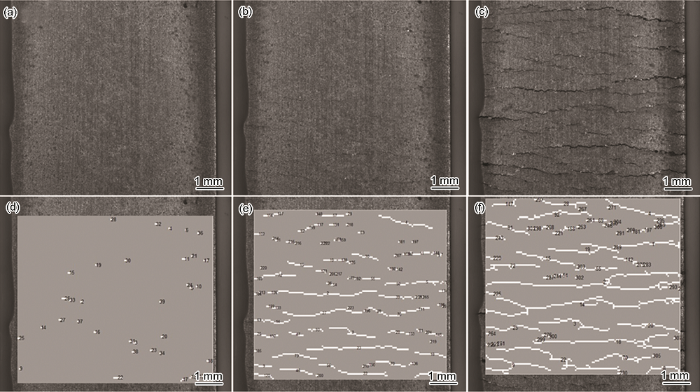
圖2 合金600在連四硫酸鹽溶液中SCC原位實驗CCD圖像和DIC分析[19]
Fig.2 CCD images (a~c) and DIC analysis (d~f) of Alloy 600 during SCC test in a tetrathionate solution for 630 min (a, d), 830 min (b, e) and 1130 min (c, f)[19]
CCD相機也可以結合不同的技術來原位監測金屬腐蝕的過程,從不同角度去分析腐蝕的發生。Wang等[20]首次使用電子散斑干涉技術 (ESPI) 通過直接觀察腐蝕產物的生長來原位監測1Cr18Ni9Ti不銹鋼和AISI 1045鋼浸入3.5% (質量分數) NaCl溶液中后點蝕的萌生和擴展。通過實驗,觀察到在點蝕期間腐蝕產物的生長可以改變入射光的波長,從而形成明亮的散斑圖案,而ESPI技術可以通過簡單地監測這些產物的演變,獲得點蝕萌生的直接證據,從而在早期階段就能夠原位觀察到點蝕的萌生。最后研究人員提出,如果在長焦距顯微鏡的輔助下,通過提高CCD的靈敏度,有可能在腐蝕速率評估方面對點腐蝕進行定量分析。
工業相機是現代工業中普遍使用的一種機器,基于CCD的工業相機因其分辨率高、成像效果好被應用在腐蝕原位監測領域,與顯微放大鏡頭配合可在毫米級甚至微米級觀測腐蝕演化情況。使用CCD相機能夠清晰地觀測到腐蝕過程中金屬表面形貌的宏觀變化,其優勢在于體積小、成本低,能夠與大多數腐蝕試驗設備兼容,便于研究人員進行腐蝕過程中更直觀的表面科學研究。
1.2 數字全息表面成像技術
數字全息表面成像技術[21,22]是通過實現同時存在的兩束光 (物光束和參考光束) 之間的相互干涉疊加,并以干涉條紋圖像的形式記載振幅和相位信息,進而來判斷試樣表面變化情況的一種技術。該種技術綜合了光學全息、計算機和電子成像等幾種技術。隨著近年來計算機技術的不斷發展,數字全息表面成像技術也取得了較大的進展。
數字全息表面成像技術以光學全息理論為基礎,利用CCD等光敏成像器件獲取全息圖像,通過計算機來顯示數字全息干涉圖像的動態變化,以實現整個金屬腐蝕過程的原位測量。其用于金屬腐蝕原位監測領域具有高時間分辨率,可實現動態測量,對于單個腐蝕坑的成像具有高靈敏度和高空間分辨率等特點,而且可以與其他傳統的電化學方法同時使用,如電化學極化曲線法和電化學阻抗譜法,具有很好的應用前景。
Yuan等[23]用數字全息技術原位研究了304不銹鋼在FeCl3溶液中的點蝕行為。他們在實驗中使用一個波長為632.8 nm的He-Ne激光產生一束光,經過空間濾波器 (SF) 進行濾波后用透鏡 (L1) 產生平行光束。通過分束立方體 (BS) 將光束分成兩個垂直光束:一束經過透鏡 (L2) 后照射電極表面并作為物體波反射回來;另一束照射到鏡面 (M) 后作為參考波反射回來。最后,兩束光波在CCD圖像傳感器處干涉,通過全息圖像處理系統獲得了恒電位測量期間的全息圖和相應的相位圖。從而得到金屬表面上觀察區域中的點蝕坑的精確數量和位置,其裝置示意圖如圖3所示。他們分別在0.10,0.20和0.30 V的電位下動態觀察304不銹鋼的早期點蝕過程,認為當電極電位為0.10 V時,在極化期間出現較少的亞穩態蝕坑;當電位達到0.30 V時,則會出現更多的蝕坑,相應的全息圖與相位圖如圖4所示。通過分析,認為相位圖能夠提供局部腐蝕行為的原位視覺證據,并與恒電位極化曲線具有很好的一致性。
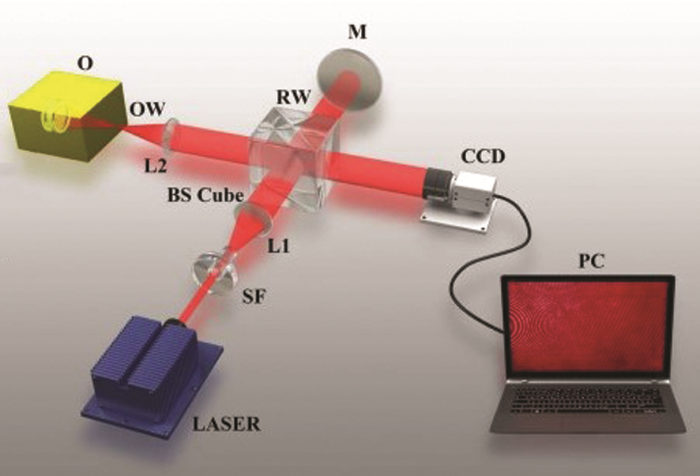
圖3 數字全息表面成像系統的實驗裝置[23]
Fig.3 Experimental setup of the digital holographic surface imaging system[23]
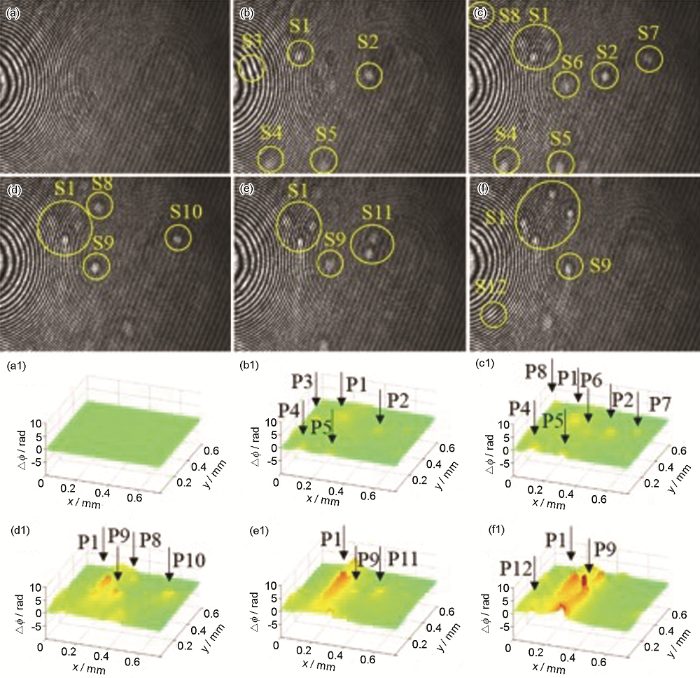
圖4 304不銹鋼在0.30 V下0.1 mol·L-1 FeCl3溶液中恒電位測量期間不同時間的全息圖和相應的相圖[23]
Fig.4 Holograms and corresponding phase maps of 304 stainless steel electrode during potentiostatic measurement at different times in 0.1 mol·L-1 FeCl3 solution at 0.30 VSCE[23]
數字全息顯微鏡 (DHM) 由于可以通過檢索樣品反射或透過樣品波的振幅和相位來研究微觀試樣,已被應用于金屬腐蝕監測領域。DHM分為透射和反射兩種類型。Klages等[24]結合透射數字全息顯微鏡與橢圓偏振顯微鏡和光學顯微鏡進行了316不銹鋼點蝕的原位可視化研究。結果表明,3種光學技術能同時觀察到亞穩態蝕坑的物理變化,并在視覺上進行縫隙腐蝕和亞穩態點蝕之間的區分。Asgari等[25]用數字全息技術量化金屬的晶間腐蝕和穿晶腐蝕,引入反射式數字全息顯微鏡作為定量評估腐蝕的新方法。通過實驗認為該方法能夠在可調節的視場中提供腐蝕試樣的微觀結構表面輪廓,進而分析AISI 304不銹鋼的顯微組織腐蝕情況。結果表明,在特定腐蝕環境中的敏化奧氏體不銹鋼會發生晶間腐蝕。
數字全息技術應用于金屬腐蝕原位監測領域的優點是,使用CCD等光敏元件使得全息圖像的記錄變得更加簡單快捷,能夠原位實時記錄試樣表面的動態變化過程;且數字圖像處理技術使得圖像處理速度和靈敏度有了很大的提高,降低了噪聲和像差等因素的影響。在全息圖像處理方面,利用計算機提供的豐富圖像處理算法實現了對全息圖像的處理和定量分析,經過Fourier變換和相位重構再現物體表面的動態變化情況。數字全息表面成像技術的出現彌補了只使用CCD相機時在圖像處理上的不足,應用在金屬腐蝕原位監測上具有很大的優勢,而且由于圖像處理技術的豐富多樣,在未來還有很大的發展空間。
1.3 X射線計算機斷層掃描技術
X射線計算機斷層掃描 (X射線CT)[26]是一種用于獲取物體三維幾何形狀和屬性等數字信息的非破壞性技術。使用X射線照射試樣,通過電腦的三維技術重建出斷層影像,將斷層影像層層堆疊形成立體影像,從而實現物體表面信息的可視化研究。
X射線CT技術在過去十幾年中有著快速的發展,其空間分辨率和圖像重建時間有相當大的改善,這從根本上提高了從3D圖像中收集到的信息水平[27]。X射線CT可以獲取材料表面的3D圖像并進行定量分析,進而從圖像中提取相應的腐蝕信息參數,目前已成為材料腐蝕領域常用的研究工具[28-30]。
X射線CT技術由于能夠通過在連續的3D圖像之間進行比較,量化材料的結構演變并進行建模,已被應用于金屬腐蝕原位監測領域。Almuaili等[31]通過使用微型三電極電化學體系結合X射線CT原位研究了304L不銹鋼在腐蝕介質中的3D點蝕動力學,其裝置如圖5所示。通過原位觀察到3個離散蝕坑的形成,獲得了3D蝕坑生長動力學。認為使用X射線CT獲得的蝕坑體積與使用Faraday定律計算的金屬溶解體積有著良好的擬合性。由X射線CT測量的蝕坑表面積大于通過假設為半球形生長的蝕坑計算所得的表面積,而且蝕坑的形狀接近細長的碟形而不是完美的半球形,實驗過程的原位X射線CT圖像如圖6所示。
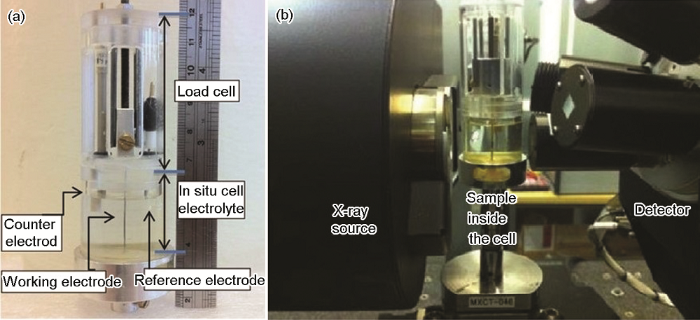
圖5 用于304L不銹鋼試樣原位X射線斷層掃描實驗的可施加應變的微型電化學系統和X射線CT原位裝置[31]
Fig.5 Photo of the miniature electrochemical cell with the capability to apply strain to a type 304L stainless steel wire sample in in-situ X-ray tomography experiment (a) and in-situ cell used in X-ray CT experiment (b)[31]
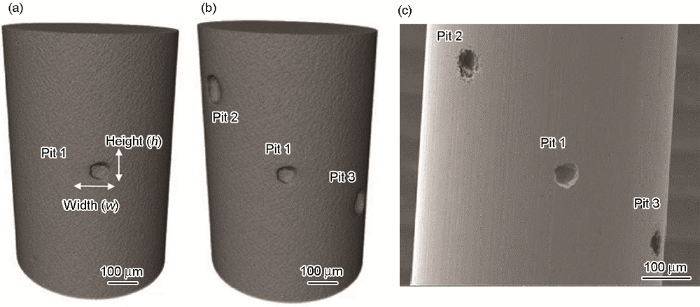
圖6 第一次電化學極化掃描后試樣的X射線CT圖像,第二次電位-動態極化掃描后的X射線CT圖像和試樣的SEM像[31]
Fig.6 Reconstructed X-ray CT images of the wire sample after the 1st electrochemical polarization scan (a) and the 2nd potentio-dynamic polarization scan (b) and SEM image of the sample with three pits (c)[31]
利用X射線CT可以原位獲得腐蝕的三維形貌圖像,對腐蝕進行數量和形態的三維表征,從而可以研究導致腐蝕坑生長甚至形成裂紋的因素。Almuaili等[32]利用X射線CT成像技術原位研究了在應變和電化學極化協同作用下304L不銹鋼腐蝕坑的再活化現象,獲得了電化學極化對微坑形態和溶解動力學影響的三維信息。認為蝕坑的再活化過程與直接相鄰的新蝕坑的形成有關。?rnek等[33]對暴露于含氯化物的大氣環境中的2202和2205雙相不銹鋼進行了比較,用X射線CT原位觀測研究了其腐蝕行為。通過三維可視化表征,認為兩種雙相不銹鋼都出現了大氣氯化物誘導的SCC,其裂紋擴展深度達到了100 μm;且2205不銹鋼的腐蝕更局部化并且優先在深度方向發生;而2202不銹鋼的腐蝕主要沿著金屬表面,產生更大面積的表面腐蝕。
X射線CT作為目前較為先進的表征技術,應用在腐蝕原位研究領域中的特點是可以對腐蝕的數量和形態進行實時三維表征,從而提供腐蝕演變的位置、程度和動力學等非破壞性原位信息。通過原位X射線CT測量,能夠對局部腐蝕進行可視化和量化研究,獲得腐蝕深度、表面腐蝕面積、腐蝕體積和局域腐蝕速率等參數,所得數據為構建材料壽命預測模型提供可靠的信息。
1.4 光學顯微鏡
光學顯微鏡 (OM) 是一種通過把微小的物體放大以進行微觀結構分析的光學儀器。其通常采用兩級放大,被觀測物體經過物鏡作第一級放大,成一倒立的實像;然后再經目鏡作第二級放大,成一虛像[34]。目前常見的OM有許多種類,其中金相顯微鏡是專門用來觀察金屬等物體金相組織的顯微鏡,其用于金屬腐蝕原位觀測領域中可以在線獲得金屬腐蝕過程中的金相組織變化情況。
OM是一種相對較為傳統的物體微觀形貌觀測儀器。如果使用光電元件、電荷耦合器等作接收器,再與計算機相連接就可以構成一個完整的圖像信息采集和處理系統,可直接對金屬腐蝕的過程進行原位監測。Ambat等[35]將濃度為3.5% (質量分數) NaCl液滴放在分別通過壓鑄和錠模鑄造成型的AZ91D鎂合金表面上,并通過OM連續監測該液滴內的腐蝕現象,記錄了試樣表面特征隨時間的變化情況。認為壓鑄成型的AZ91D鎂合金比錠模鑄造成型的具有更好的耐腐蝕性和鈍化性能。Wang等[36]用OM原位觀察了X80鋼在NaCl溶液中點蝕的萌生和擴展過程,研究了夾雜物與點蝕萌生的關系。認為點蝕主要是由力學缺陷引起的,還有一部分則是由金屬夾雜物引發的;而且點蝕坑的直徑隨時間的變化大致遵循指數衰減,意味著點蝕的擴展速率隨時間降低。
將OM與電化學技術結合能夠獲得更多有用的信息,應用在金屬腐蝕原位監測領域有很大的優勢。Zhao等[37]通過恒電位儀和OM原位觀察了AA7075鋁合金在NaCl溶液中的局部腐蝕,將試樣表面的放大圖像和瞬時極化曲線的組合作為表面腐蝕過程的電勢函數,記錄了活性表面層在經拋光的AA7075鋁合金上的溶解。結果顯示,在離子研磨或化學蝕刻的樣品中未觀察到層溶解,認為腐蝕敏感表面層是在拋光過程中形成的。Green等[38]使用恒電位儀和OM原位觀察了在0.6 mol/L NaCl溶液中Zr50Cu40Al10金屬玻璃表面上的點蝕情況。通過將極化曲線與顯微圖像相結合,認為電位在腐蝕電位Ecorr時金屬玻璃表面上有點蝕坑生成并不斷擴展,進一步增加電位則會導致表面上更多點蝕坑開始形核。
由于放大倍率較低、景深較小等缺點,傳統OM無法對金屬腐蝕行為進行深層次的研究。隨著科技的進步,已經開發出了具有高放大倍率和超高景深的OM,再次推進了OM在金屬腐蝕原位監測領域中的應用。李彥[39]用超高景深三維共焦OM對18-8不銹鋼分別在不同濃度的NaCI溶液、HNO3溶液、HCl溶液中的腐蝕過程進行原位跟蹤拍攝,并對不銹鋼腐蝕后表面的顯微圖像進行了示差處理,獲得了18-8不銹鋼在不同濃度的幾種溶液中腐蝕的微觀形貌動態特征。
OM在金屬腐蝕原位監測領域應用中的另一個限制是由于其本身結構原因,無法與已有的一些大型腐蝕實驗設備兼容,需要特制才能與其聯用。肖慧瓊[40]在已有理論的基礎上,設計了一臺如圖7所示的能夠與大多數OM兼容的小型慢應變速率應力腐蝕原位測試裝置。利用該裝置研究了7075航空用鋁合金在3.5%NaCl溶液中的應力腐蝕,并用OM原位觀測了如圖8所示的試樣在實驗過程中的形貌變化以及應力腐蝕裂紋的萌生、擴展行為。結果顯示,大多數裂紋都是在點蝕坑附近萌生并擴展,而且不同地方的裂紋會擴展連接到一起,形成大的裂紋,最終導致試樣發生斷裂。這項工作為金屬的應力腐蝕原位研究提供了新的途徑。

圖7 用于應力腐蝕實驗的光學顯微鏡原位測試裝置[40]
Fig.7 Photograph of the optical microscope used for in-situ observation in stress corrosion experiment[40]
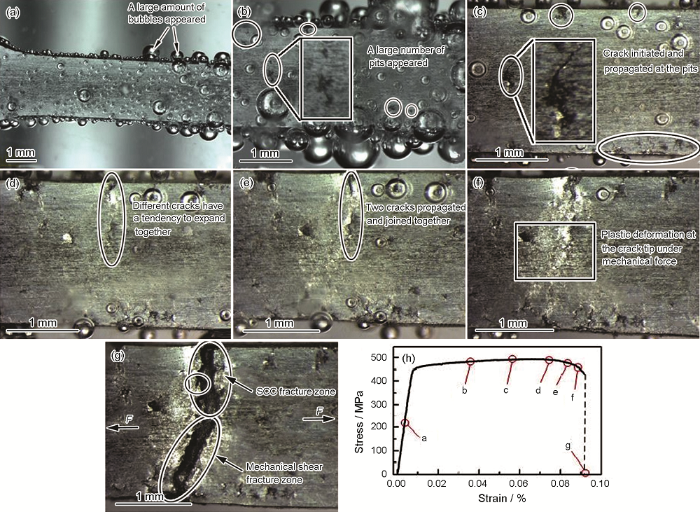
圖8 7075鋁合金在光學顯微鏡下的SCC過程及相應的應力-應變曲線[40]
Fig.8 Optical microscope photos of 7075 aluminum alloy after SCC test for 1 h (a), 10 h (b), 15 h (c), 20 h (d), 23 h (e), 23.8 h (f) and 24.5 h (g) and corresponding stress-strain curve (h)[40]
光學顯微鏡因為結構的特殊性,目前在應力腐蝕等特殊腐蝕的原位研究中應用相對較少,但在金屬點蝕原位研究中有著較為廣泛的應用,能夠原位跟蹤觀測點蝕的形核和擴展過程,與電化學技術聯合使用能夠獲取到更為充分的腐蝕過程信息,以更加準確地探究腐蝕機理。
1.5 掃描電子顯微鏡
掃描電子顯微鏡 (SEM) 作為目前應用廣泛的一種微觀研究工具,主要是利用電子束去掃描樣品,通過電子束與樣品的相互作用產生各種效應。SEM由電子光學系統、信號收集處理及圖像顯示系統、真空系統和電源系統組成[41]。其工作原理為利用高能電子束在試樣上掃描,以激發出各種物理信息,通過接受并放大這些信息后在電子屏上形成掃描圖片,從而獲得被測試樣的表面微觀形貌[42]。
SEM可直接利用試樣表面的物理性質進行微觀成像,因而可被用來進行金屬腐蝕原位觀測實驗。鄒楊等[43]用SEM原位跟蹤觀察了經過不同處理的Cr5Mo+A302異種鋼在NACE溶液中隨時間變化的腐蝕過程。結果表明,經過焊后熱處理的熔合區的耐腐蝕性比焊態下的低,而寬熔合區的耐腐蝕性要好于窄熔合區的。Li等[44]用SEM原位監測了點蝕坑對6151鋁合金疲勞裂紋萌生和早期擴展行為的影響。結果顯示,多裂紋的萌生幾乎發生在點蝕坑中,而且這些點蝕坑會改變疲勞裂紋擴展的路徑。
將SEM和其他技術手段結合使用也可以從多角度獲得腐蝕信息。Wang等[45]用SEM,電化學阻抗譜和動電位極化共同研究了X80管線鋼在不同pH和氯含量的NaCl溶液中的點蝕機理。通過拍攝不同時間如圖9所示的腐蝕表面的SEM像,研究了點蝕坑隨時間的擴展情況。認為溶液的pH和氯化物濃度對點蝕形態有很大的影響,堿性溶液中的點蝕行為與中性和酸性溶液中的明顯不同,且堿性溶液中的點蝕坑尺寸遠小于中性和酸性溶液中的。
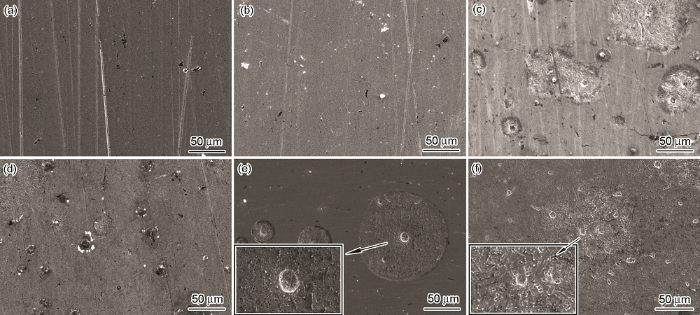
圖9 X80管線鋼在不同溶液中浸泡1 h后腐蝕表面蝕坑的SEM像[45]
Fig.9 Pitting morphologies of the corroded surface of X80 pipeline steel after immersed for 1 h in different solutions: (a) pH=12.5, 0.05 mol/L Cl-, (b) pH=12.5, 1 mol/L Cl-, (c) pH=7, 0.05 mol/L Cl-, (d) pH=7, 1 mol/L Cl-, (e) pH=4, 0.05 mol/L Cl-, (f) pH=4, 1 mol/L Cl-[45]
SEM自問世以來,由于放大倍數高、景深和視野大等優點在原位監測領域就已經有著廣泛的應用[46, 47]。但由于其必須在真空環境下工作,對腐蝕實驗的多樣性有著一定的限制,如進行應力腐蝕開裂實驗時,需要特制適用于SEM的微型拉伸裝置,而無法與慢應變速率拉伸機等已有設備聯用。劉震[48]用SEM原位觀察了2A14鋁合金試件在3.5% NaCl溶液中的應力腐蝕行為,并與未發生應力腐蝕的試樣進行對比,分別觀察了兩種情況下裂紋萌生和擴展的方式,結果顯示未發生應力腐蝕的試樣裂紋為穿晶型裂紋,而發生應力腐蝕的試樣裂紋為沿晶型裂紋。
SEM是目前材料表面科學領域廣泛應用的一種技術,其應用于金屬腐蝕原位監測領域能夠很好地表征金屬材料表面的腐蝕形貌變化,效果要遠好于CCD相機等技術。但SEM需要在真空環境下工作,且無法與一些大型腐蝕試驗設備兼容,目前在腐蝕原位監測領域應用相對較少。
1.6 原子力顯微鏡
原子力顯微鏡 (AFM) 是由Binnig等[49]于1986年在STM的基礎上發明的。其原理為當原子間距離減小到一定程度以后,原子間的作用力將迅速上升,由顯微探針受力的大小就能夠直接換算出樣品表面的高度,從而獲得樣品表面形貌的信息。主要有接觸式、非接觸式和輕敲式[50]。
90年代后期,AFM等局部探針顯微鏡開始在各領域廣泛使用。因其具有很高的空間分辨率 (原子級) ,能在各種環境下 (空氣、真空和液體等) 獲得金屬表面形貌的三維圖像,且不需要像SEM一樣對試樣進行預先特殊處理,不會對金屬試樣造成不可逆的改變或損壞,從而被廣泛應用于金屬腐蝕原位監測領域[51-53]。Martin等[54]用AFM原位監測了奧氏體304L不銹鋼在氯化物溶液中的局部腐蝕情況,以研究在沒有夾雜物或沉淀物等宏觀結構缺陷的情況下,點蝕發生位置的特征。結果表明,點蝕坑會優先在試樣表面的應變硬化區 (由機械拋光處理引起) 中產生。
AFM因其本身結構簡單,兼容性好,而被開發出各種不同的形式。電化學原子力顯微鏡 (EC-AFM) 就是其中的一種,其主要是將接觸式AFM同電化學工作站聯用。Shi等[55]采用EC-AFM原位研究了AlxCoCrFeNi高熵合金 (HEAs) 在3.5%NaCl溶液中的局部腐蝕情況。在不同的陽極氧化電位下原位監測了微/亞微尺度的表面形貌變化。結果顯示,隨著合金中Al含量的增加,其局部腐蝕機理從點蝕變為相界溶解腐蝕,耐腐蝕性降低。魯亮[56]用EC-AFM原位跟蹤觀察了CO2腐蝕介質中35CrMo鋼的腐蝕形貌變化和相位變化。結果表明,當電位達到自腐蝕電位之前約10 mV時,試樣發生局部腐蝕突變,導致試樣表面出現較深的腐蝕坑。
高速AFM (HS-AFM) 是由Bristol Nano Dynamics公司開發的,其運行速度比傳統AFM快幾個數量級,并且能夠每秒捕獲多個幀,具有納米橫向分辨率和亞原子高度分辨率,可以實現在納米尺度下原位觀察腐蝕過程[57]。Moore等[58]用如圖10所示的HS-AFM原位平臺觀察了熱敏化304不銹鋼在1%NaCl水溶液中的局部腐蝕。通過進行動電位和恒電流掃描使試樣表面極化,原位觀察到如圖11所示的腐蝕形貌,在試樣表面上可見許多大的腐蝕坑,而且晶粒內的腐蝕坑呈圓形,晶間腐蝕坑呈細長形。
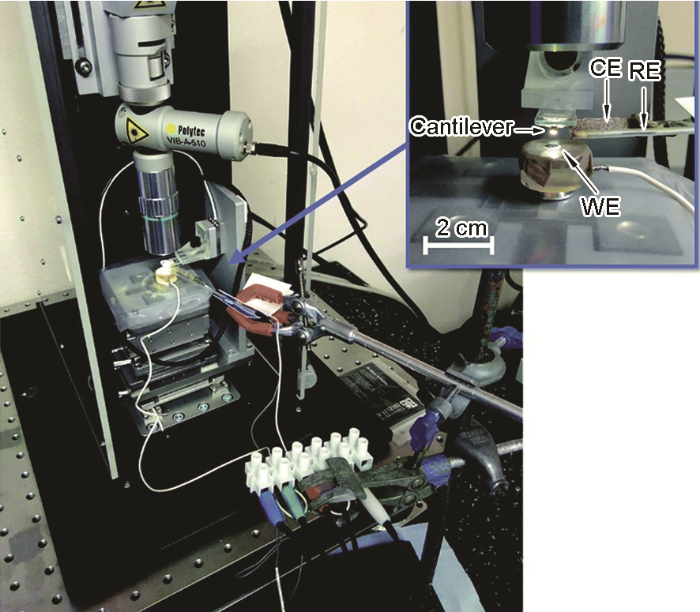
圖10 HS-AFM原位實驗平臺三電極裝置的局部放大圖[58]
Fig.10 Partial enlarged drawing of in-situ experimental set-up of HS-AFM and three-electrode system[58]
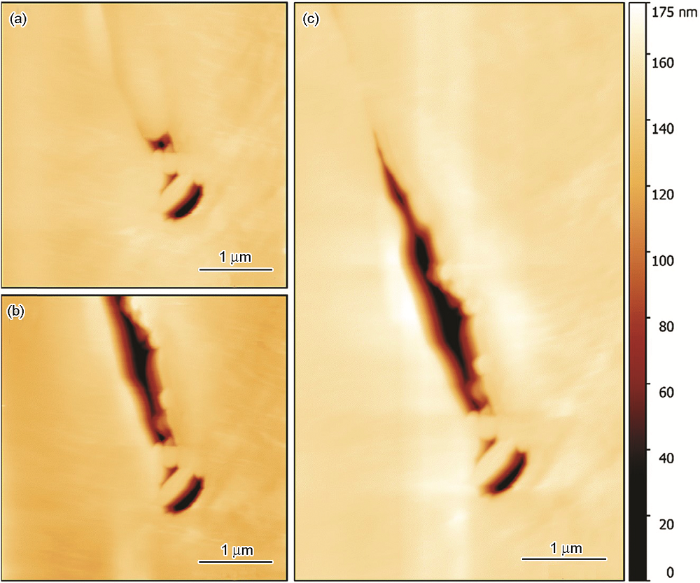
圖11 敏化AISI 304不銹鋼在1%NaCl水溶液中晶界腐蝕的AFM像[58]
Fig.11 AFM topographic maps showing GB corrosion process of sensitised AISI 304 stainless steel in 1%NaCl solution: before (a) and after (b) the formation of intergranular pit, and the full intergranular pit formed (c)[58]
AFM作為一種近場顯微鏡用于金屬腐蝕原位監測領域中有著SEM等遠場顯微鏡無法比擬的優點,能夠觀測到金屬的三維表面輪廓。EC-AFM技術能夠實時測量電化學信息并獲取金屬表面腐蝕變化情況的三維圖像。HS-AFM分辨率甚至能夠達到納米級,對原位研究具有較大的幫助。這些技術的不斷發展使得AFM技術在腐蝕原位研究領域有著更廣闊的應用前景。但由于其特殊的工作原理和結構,AFM也存在著諸多限制。首先,與SEM相比,其景深和視野較小。SEM可以使用毫米級的景深對平方毫米級的區域進行成像,而AFM只有約150 μm×150 μm的最大掃描區域和10~20 μm的最大景深。其次,AFM掃描速度較慢,無法與SEM一樣進行實時的掃描。
1.7 透射電子顯微鏡
透射電子顯微鏡 (TEM) 是一種顯微放大成像技術,通過電子束透過試樣以形成圖像。TEM的分辨率可以達到亞埃級,放大倍數高達幾萬~幾百萬倍[59]。使用TEM可以觀察到材料的精細結構,甚至于一列原子的結構,比OM所能夠觀察到的最小的結構小數萬倍,已成為目前最常用的材料微觀結構表征技術之一。
TEM是物理、化學和半導體研究等領域的主要分析方法,也是納米科學在材料領域的重要分析工具,可對試樣進行一般形貌觀察和物相分析,觀察晶體中存在的結構缺陷,確定缺陷的種類、估算缺陷密度等。高分辨電子顯微技術可以直接觀察到晶體中原子或原子團在特定方向上的結構投影,利用TEM中附加的能量色散X射線譜儀也可以同時對試樣的微區化學成分進行分析。如今,隨著電子源和磁透鏡的發展,TEM已成為最佳納米成像技術,其空間分辨率提升至亞埃級[60]。由于其超高的分辨率,已在金屬材料腐蝕領域有著大量的應用,可對材料的腐蝕進行納米甚至原子級別的研究[61,62]。
由于腐蝕機制的缺乏,精確預測材料在指定條件下如何以及在何處退化是腐蝕研究中最大的挑戰之一。原位TEM技術的快速發展使得動態捕獲材料微觀結構的變化得以實現,并可在超高分辨率下對金屬材料的腐蝕機理和物理化學進行原子水平的原位研究[63,64]。Zhang等[65]采用原位TEM技術對316F、超級304H不銹鋼以及2024-Al合金3種材料的點蝕進行了研究。通過多尺度表征跟蹤發生初始點蝕的準確位點以及腐蝕的擴展,對初始點蝕發生的位置提供納米甚至原子級信息,并探究點蝕起始機理,表明由結構缺陷引起的電極電位的不均勻性是引發初始腐蝕的最基本的驅動力。
聯合使用TEM和電化學技術對金屬材料腐蝕進行原位研究能夠將電化學信息和相對應的微觀結構表征結合起來對腐蝕過程加以分析。Zhang等[66]結合TEM技術和傳統電化學方法研究316F奧氏體不銹鋼的亞穩態點蝕,應用準原位外極化透射電子顯微鏡觀察了對應于電化學極化曲線特征區域的腐蝕微觀結構演變。認為當夾雜物的溶解擴散到鋼的基體時,會形成如圖12所示的一些直徑為0.5~2 μm的亞穩態蝕坑,動電位曲線中的瞬態電流峰值正是由亞穩態點蝕引起的,且鈍化區內電流密度的逐漸增加是由硫化物夾雜物的電化學溶解引起的。從峰的尺寸可判斷出溶解的MnS含量和腐蝕性溶解的嚴重性。
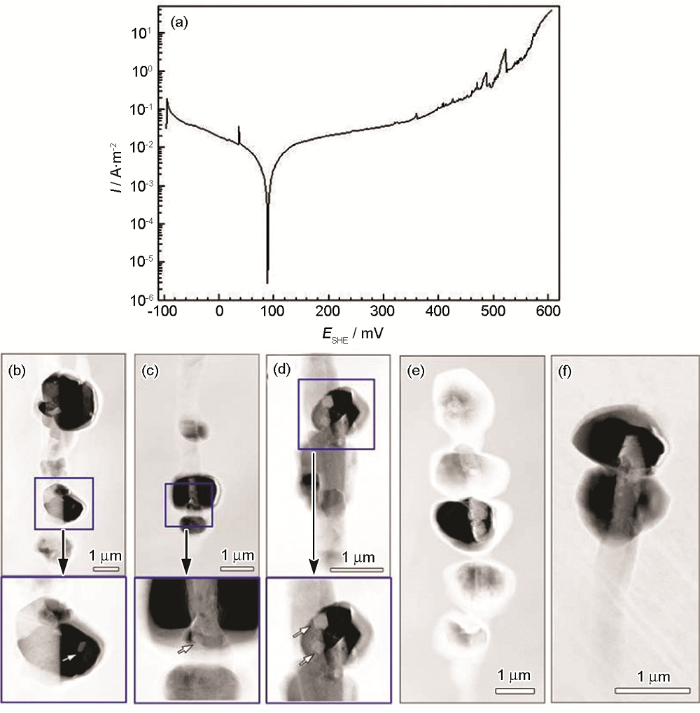
圖12 極化測量后試樣的動電位極化曲線和腐蝕過程STEM圖像[66]
Fig.12 Dynamic potential polarization curve of the sample after polarization measurement (a) and STEM images showing corrosion process (b~f)[66]
在原位腐蝕研究中結合具有超高分辨率成像的TEM和能譜儀 (EDS) 能夠同時獲得金屬材料腐蝕微觀結構演變和腐蝕過程的元素分布信息,對腐蝕在納米尺度的研究分析非常有幫助。Zhang等[67]采用了準原位STEM-EDS方法,通過原位監測含Ag的Mg-Gd-Zr合金在腐蝕初始階段的納米級腐蝕行為以研究Ag對合金腐蝕的影響作用。在腐蝕過程中直接觀察到α-Mg基體與β沉淀物之間界面處的氧偏析和富Ag顆粒的形成,促進了微電偶腐蝕,導致Mg-2.4Gd-0.4Ag-0.1Zr的腐蝕速率加快,腐蝕增強。
TEM能夠在超高分辨率下提供材料形態學、結晶學的局部信息,其應用在金屬腐蝕原位監測領域中的優勢是能夠在納米尺度動態監測腐蝕過程中材料的微觀結構演變,對腐蝕過程進行原子級的研究。腐蝕的演化是從微觀到宏觀的積累過程,TEM的出現使得微尺度的腐蝕原位研究成為可能,為金屬腐蝕機理的探究提供了新的途徑。
1.8 幾種空間分辨技術比較
目前常用的一些空間分辨技術在構造、價格等因素方面差異較大,在使用時有諸多限制。工業相機由于結構簡單,可以與許多不同的技術結合起來進行原位監測,但其分辨率和放大倍率等參數的增大往往伴隨著價格的大幅度上升,因此目前普遍用其進行毫米級的觀測。數字全息表面成像技術利用光學全息理論進行工作,其對圖像處理技術要求較高。但在目前隨著計算機技術的迅猛發展,圖像技術有了質的飛躍,有許多軟件可以對所獲得的圖像方便快捷的進行優化處理。X射線CT技術可以對金屬腐蝕進行三維原位觀測,能夠對腐蝕形態進行量化研究,是目前較為先進的一種表征技術,但其設備構造復雜,造價高昂,不具有普適性。傳統的OM往往放大倍率低,景深小,但隨著技術的發展,已開發出大倍率和超高景深光學顯微鏡。由于OM結構的特殊性,故而無法與一些腐蝕試驗設備兼容,在浸泡腐蝕原位監測中有著比較廣泛的使用。SEM和TEM分辨率高,能夠很好地原位監測金屬腐蝕情況,但其設備復雜,價格高昂,且需要進行特殊改造方能進行原位研究,用以進行準原位研究相對會簡單。AFM的掃描區域和掃描速度相對較慢,但其結構簡單,兼容性好,已開發出的電化學原子力顯微鏡、高速原子力顯微鏡等在金屬腐蝕原位監測中表現突出,能夠清晰地捕獲到腐蝕擴展情況。
2 總結與展望
本文對7種常用的空間分辨技術在金屬腐蝕原位監測領域的應用進行了綜合介紹,并對每一種技術的優缺點和適用性進行了總結。其中工業CCD相機、數字全息表面成像技術、光學顯微鏡和原子力顯微鏡由于設備簡單,價格相對較低,目前在金屬腐蝕原位監測領域有著較為廣泛的應用。X射線計算機斷層掃描技術、掃描電子顯微鏡和透射電子顯微鏡由于設備結構特殊,造價高昂,因而只在部分大型實驗室有應用,相對不具有普適性。
金屬的腐蝕是一個復雜的過程,原位監測技術因能夠獲得腐蝕過程中的動態信息而應用越來越廣泛,原位研究也是未來腐蝕研究領域重要的方向。空間分辨技術能夠原位觀察到金屬腐蝕過程中表面微觀形貌的變化,將其與電化學等其他技術相結合,可以多尺度更全面的獲得腐蝕過程中的信息,從而為腐蝕機理的研究提供更好的技術手段。在未來的發展中,希望可以通過不斷改進和完善監測技術從而能更廣泛、方便地進行使用,以期獲得更全面的腐蝕信息,進而對腐蝕機理進行更深入探究,為金屬的腐蝕防護問題提供更具有指導性的建議。
免責聲明:本網站所轉載的文字、圖片與視頻資料版權歸原創作者所有,如果涉及侵權,請第一時間聯系本網刪除。
相關文章

官方微信
《中國腐蝕與防護網電子期刊》征訂啟事
- 投稿聯系:編輯部
- 電話:010-62316606-806
- 郵箱:fsfhzy666@163.com
- 中國腐蝕與防護網官方QQ群:140808414
點擊排行
PPT新聞

“海洋金屬”——鈦合金在艦船的
點擊數:7130

腐蝕與“海上絲綢之路”
點擊數:5741