



0 前言
再制造通過對退役零件進行專業化修復或升級改造使其質量特性不低于新品零件,是產品殘余價值有效重用的重要途徑之一[1]。退役零件的失效模式多種多樣[2],包括磨損、老化、斷裂、裂紋等。不同的失效模式及其失效程度是影響零件能否再制造重用的關鍵因素之一,快速精確量化表征其失效特征對于退役零件的再制造評價和再制造工藝選擇具有重要意義。
零件內部的失效特征多采用超聲波無損探傷、電磁波無損探傷、射線檢測等[3-5] 技術測量并表征其失效程度。零件表面的失效特征常采用模糊評價法、3D掃描重建法等[6-7]進行表征。其中,模糊評價法通過專家評價結果進行失效特征量化,主觀性較大,評價結果不精確。掃描重建法使用3D掃描儀獲取零件的三維點云,通過對比分析新舊零件得到其失效特征表征結果,精度高,但需要特定的設備, 成本高,過程復雜,效率低。
圖像三維重建一直是計算機視覺中的經典問題,圖像三維重建分為多攝像頭重建和單攝像頭重建[8-9],單攝像頭重建方法成本更低,包括由聚焦獲取深度(Depth from focus,DFF) [10]、由陰影恢復形狀( Shape from shading, SFS) [11]、由運動恢復形狀(Shape from motion,SFM) [12]等典型方法,其中,SFM算法具有重建精度高、效率高等特點,是近年來研究和應用的熱點算法。 SFM算法應用SIFT、 SURF、 AKAZE等特征檢測算法[13-15] 提取序列圖像中的特征點,以相同特征點建立假定光度匹配, 并使用RANSCA算法[16]對匹配結果進行優化,且根據后續流程不同,SFM算法可分為增量式SFM和全局式SFM算法。增量SFM算法選取最大相匹配特征點和最佳基線角度的圖像對作為初始圖像對進行兩視圖重建,利用三角定位恢復特征點三維坐標,應用光束平差法對坐標進行優化,并逐張加入圖像實現多視圖重建,得到稀疏點云。陳輝等[17]使用增量SFM算法實現了沙堆的三維重建,并進行了尺寸測量。董建偉等[18] 使用無人機拍照并利用增量SFM算法實現了港口煤堆的三維重建。但是,由于增量式SFM算法在重建過程中逐張加入圖像,計算圖像中特征點的三維坐標,隨著圖像數量增加,導致計算誤差積累, 相機軌跡閉包處理困難,重建點云產生飄移。
全局式SFM算法的優勢在于小基線下可以非常精確估計相對應的兩視圖旋轉,將誤差平均分布, 同時減少了光束平差次數,提高了重建效率,但對圖像質量和相機內部參數要求更為嚴格。魯晨曦[19] 使用全局SFM算法實現了建筑物的三維重建。 MOULON等[20] 對全局SFM算法進行改進,提出了有效的對偶三焦張量估計方法以得到穩定的平移方向,并定義了一種平移匹配方法以恢復相機的幾何位置,提高了算法的重建精度。
退役零部件的表面失效模式包括變形、磨損、腐蝕等,其失效量級多為毫米級,失效部分形狀不規則,需要完整獲取退役零件的全部失效特征,并保證重建點云的閉合性和完整性,且為減少點云處理步驟,增加點云光滑度,需要盡可能減少噪點數量。增量SFM算法存在重建點云中三維點漂移,重建過程中相機閉包處理困難等問題,全局SFM算法誤差分布均勻,噪點少,但相機內部參數的精確度有待提升,因此,上述方法都無法直接用于退役零件表面失效特征的三維重建。為此,文中提出了自標定全局SFM算法,使用退役零件圖像集構建圖像特征點匹配關系,應用光束平差法自標定相機,優化相機焦距、徑向畸變參數,結合全局SFM算法完成重建,提高了算法的魯棒性。為提高零件表面失效特征表征效率,文中提出了基于圖像三維重建的退役零件表面失效特征表征方法,由退役零件序列圖像快速獲得其失效特征信息。
1 自標定全局SFM算法
1.1 相機自標定
被測物體的圖像坐標與世界三維坐標轉換的準確度很大程度上影響圖像三維重建結果的好壞,坐標轉換公式如式(1)所示
 (1)
(1)
式中,(X W,Y W,Z W )表示三維物體世界坐標,Z C 表示相機坐標,(U,V)表示像素平面坐標,K 為相機內參矩陣,M 為相機外參矩陣,f x、f y 為歸一化焦距,s 為傾斜因子,c x、c y 為點在圖像坐標系上的坐標,R 表示旋轉矩陣,T 表示平移矩陣。式(1) 是針孔相機模型的坐標轉換公式,實際情況中還需要考慮相機的徑向畸變參數。
由式(1)可知,影響重建精度的主要因素為相機的內參矩陣和外參矩陣,內參矩陣的主要影響因子為相機的焦距和畸變參數,已有研究一般應用張友正提出的相機標定法[21]標定,需要構建相機標靶的圖像集,耗時長,適用場景有限,且拍攝圖片過程中,相機畸變受溫度、風速、氣壓等外界環境影響,單獨的實驗室標定數據難以符合實際情況。文中使用退役零件圖像集中的退役零件作為標定物,無需單獨制作相機標靶進行相機標定。構建圖像集時應用同一相機從不同角度獲取待重建物體的序列圖像, 獲取圖像間大量匹配點對,應用光束平差算法求解相機焦距和徑向畸變參數。相機自標定模型如圖1所示。
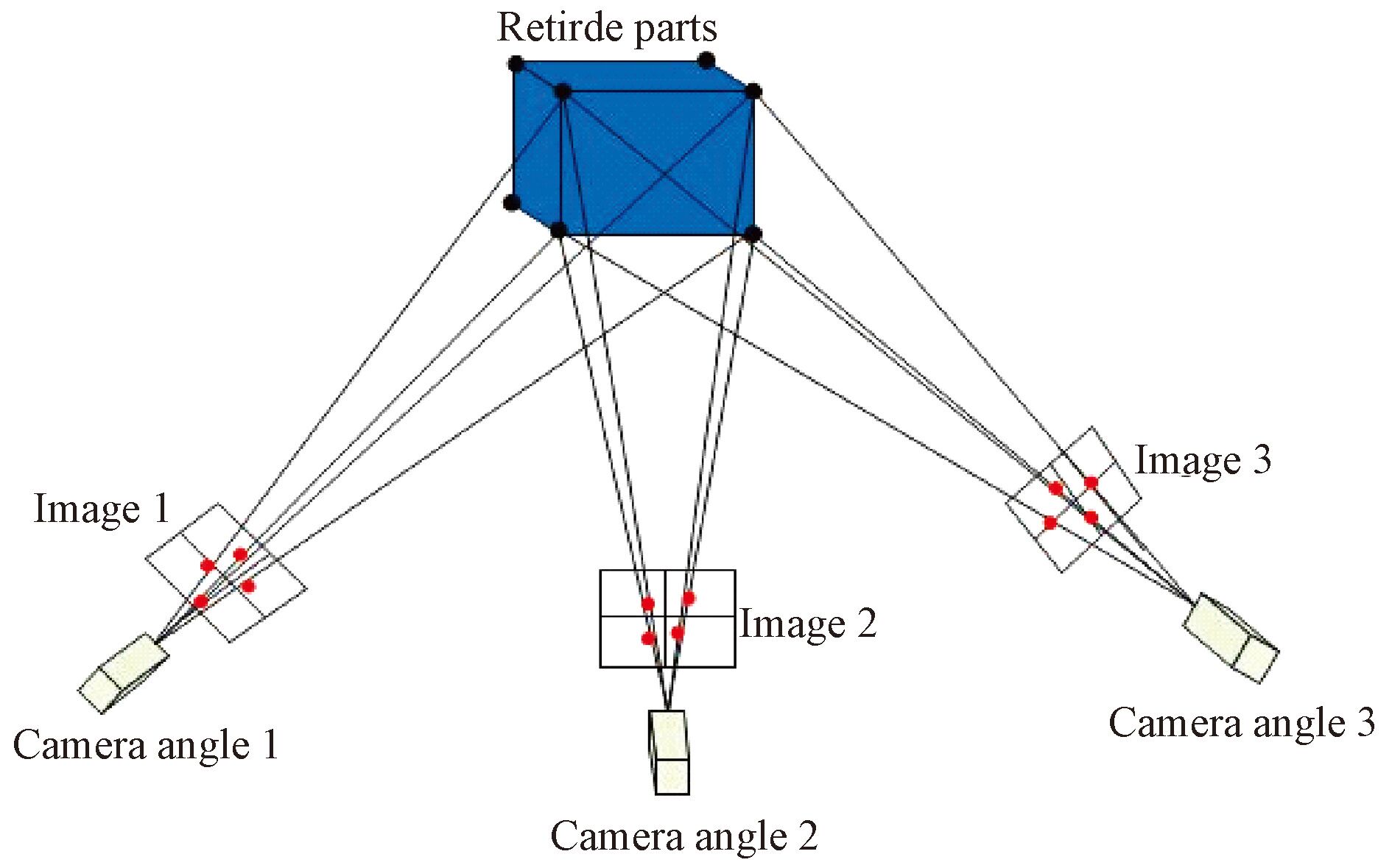
圖1 相機自標定模型
根據圖片內部的可交換圖像文件格式(EXIF) 信息估計相機的焦距,其公式如下。
 (2)
(2)
式中,f p 為相機焦距( 像素), f m 為相機焦距( 毫米),w p、 h p 分別表示圖像寬度和長度( 像素), ccdw m 為相機傳感器寬度(毫米)。應用SIFT算法提取圖像中的特征點并建立匹配關系,應用ACRANSAC算法[22]消除誤匹配,應用增量SFM算法尋找篩選初始圖像對,完成二視圖重建和三視圖重建,由于參與重建的圖像數量少,避免了增量SFM算法累積誤差的產生,同時可獲取足量特征點的三維坐標,然后應用光束平差算法求解相機的焦距 f p 和畸變,其中,考慮相機模型為針孔徑向,相機畸變參數只考慮徑向畸變,階數為三階, 徑向畸變模型如式(3)所示
 (3)
(3)
式中,r 為像平面坐標系中點(x,y)與圖像中心(x 0, y 0)的像素距離,( x c,y c)為修正后的坐標,k 1、k 2、k 3 為徑向畸變系數。對于一個特征點,可在多幅圖像上可列出其誤差方程
 (4)
(4)
式中,
為特征點像素坐標系的修正矩陣,A、B、C 為相機內外參數和特征點三維坐標的偏導數矩陣,X 1、X 2、X 3 為相機內外參數和特征點三維坐標的修正數,
為觀測值向量。
根據最小二乘原理可列出式(4)的法方程式
 (5)
(5)
式中,P 為特征點觀測值的權矩陣。對法方程式消元即可得到關于相機內外參數的非齊次線性方程組,求解得出相機的焦距和三階徑向畸變參數。
1.2 自標定全局SFM算法流程
文中將相機自標定融入到全局SFM算法中,提出了自標定全局SFM算法,其步驟如下。
步驟1:對圖像集中的圖像進行預處理,獲取相機的內參信息,應用SIFT算法提取和匹配圖像中特征點,構建圖像匹配關系。
步驟2:應用增量SFM算法完成三視圖重建,獲取三視圖間大量匹配點對。
步驟3:應用光束平差算法求解相機焦距和三階徑向畸變參數。
步驟4:以求解的相機內部參數和已經構建好的圖像匹配關系為基礎,計算每個視圖的全局旋轉矩陣。
步驟5:計算每個視圖的平移矩陣,進行三角定位和整體光束平差得到重建物體的稀疏點云。
步驟6:應用CMVS/PMVS算法得到重建物體的稠密點云。
圖2 為文中算法的流程圖。
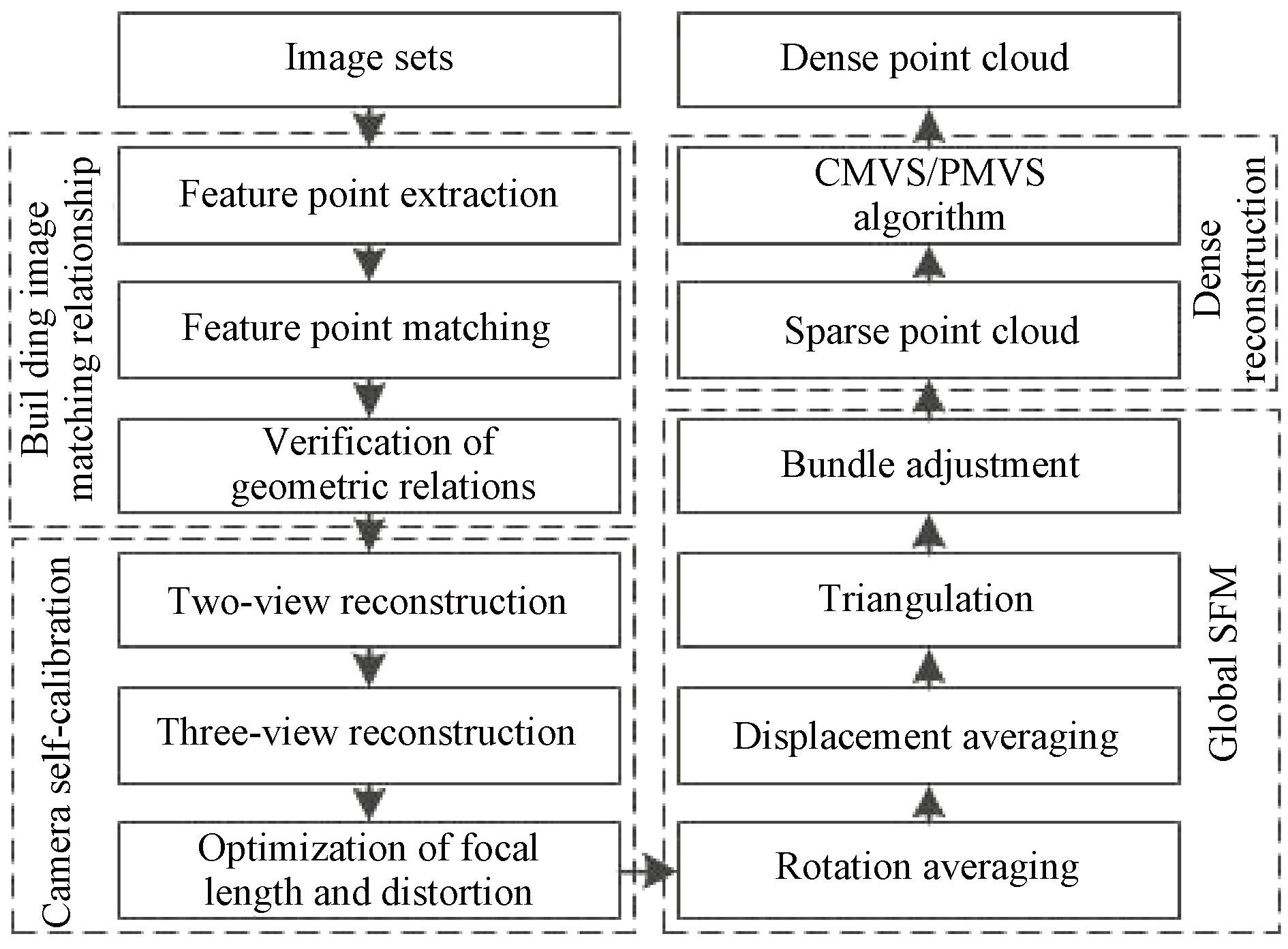
圖2 自標定全局SFM算法流程圖
2 基于試驗的圖像重建精度評價
2.1 重建精度評價模型
退役零件三維模型的重建精度受多種因素影響,主要因素包括以下幾點。
(1) 重建有效三維點數量占比。退役零件重建三維曲面由退役零件稠密點云中的有效三維點相互連接構成,為了能夠使三維點擬合而成的曲面更加致密,需要三維重建算法能夠求解出盡可能多的三維點以生成高精度的稠密點云。由于圖像中的噪聲點和圖像對間錯誤匹配對的存在,重建后的稠密點云中會不可避免的產生噪點,增加逆向工程重建的時間復雜度,如刪除不盡,則可能與有效三維點相連接而形成錯誤的三維曲面,從而引入誤差,影響三維模型的表面形狀,為了減少上述問題,應使重建有效三維點數量盡可能多,同時,重建有效三維點數量占重建三維點總數的比例應盡可能高。
(2) 點云完整度。由于失效特征在退役零件表面呈隨機分布,重建出的退役零件三維模型應盡可能的包含全部的失效特征,這要求在盡可能恢復更多有效三維點的基礎上使三維點均勻分布,構成退役零件的完整模型。
(3) 相機位姿估計準確度。三維點坐標由基本矩陣分解得到的內參矩陣和外參矩陣轉換求出,相機旋轉位姿估計的準確與否影響三維點坐標的精確度。
根據上述分析,文中以重建有效三維點數量占比、點云完整度和相機位姿估計準確度為評價標準, 根據影響程度不同設置不同的權重,構建重建精度評價模型,如式(6)所示
 (6)
(6)
式中,S a 為重建稠密點云中三維點總數,S e 為重建有效三維點數量,該值由S a 減去噪點數確定,重建產生的噪點應用點云濾波算法[23] 去除,MaxS e 為重建相同物體時不同方法所獲取的最大有效三維點數量,I 為點云完整度,定義完成程度為4個級別,由大到小,對應值為1、0.9、0.8、0.7,C 為相機位姿估計準確度,根據相機姿態分4個級別,由大到小,對應值為1、0.9、0.8和0.7,w 1、w 2 和w 3 為對應權重, 根據對后續逆向重建的影響程度,依據層次分析法[24]確定,分別為0.3、0.4和0.3,P 為重建精度, 范圍為0~1,數值越大,重建精度越高。
2.2 試驗及結果分析
退役零件的形狀多種多樣,不同形狀的零件重建效果不盡相同,退役零件圖像集中圖像數量不同, 圖像分辨率不同,也會影響重建質量。為模擬各種可能的情況,文中選取了形狀各不相同的物體,拍攝不同數量的圖片構成圖像集,各圖像集中圖像的分辨率各不相同,為了進一步驗證文中算法的有效性, 與VisualSFM [25]提供的增量SFM算法、openMVG提供的增量和全局SFM算法進行了比較,選取4個圖像集進行試驗。
文中基于openMVG開源庫進行程序開發,試驗環境為處理器Intel Core i5-4200H,3.4GHz,8GB內存, Windows10操作系統, 軟件平臺為CMVS/PMVS開源庫、Geomagic軟件、meshlab軟件。圖像集信息如表1所示。
表1 圖像集信息

重建后有效三維點組成的稠密點云和相機位姿對比如圖3所示。
由圖3可見,中部為重建物體的稠密點云,圍繞稠密點云呈環形分布的是重建的相機位姿,文中所提自標定全局SFM算法的相機位姿位置估計最為準確,相機位置分布均勻,稠密點云完整度最高。這是由于自標定全局SFM算法使用校準后的相機焦距和三階徑向畸變參數,在求解相機外參矩陣即相機位姿時數值更為精準,點云完整度更高。其次分別為MVG全局算法、MVG增量算法,使用式(2)估計相機焦距, 結果存在一定的偏差。最次為VisualSFM算法,由于使用圖像內部的焦距信息作為初始參數,其相機位姿估計有明顯的偏差,點云完整度低且存在部分點云漂移。
重建有效稠密點云信息與計算精度如表2所示。
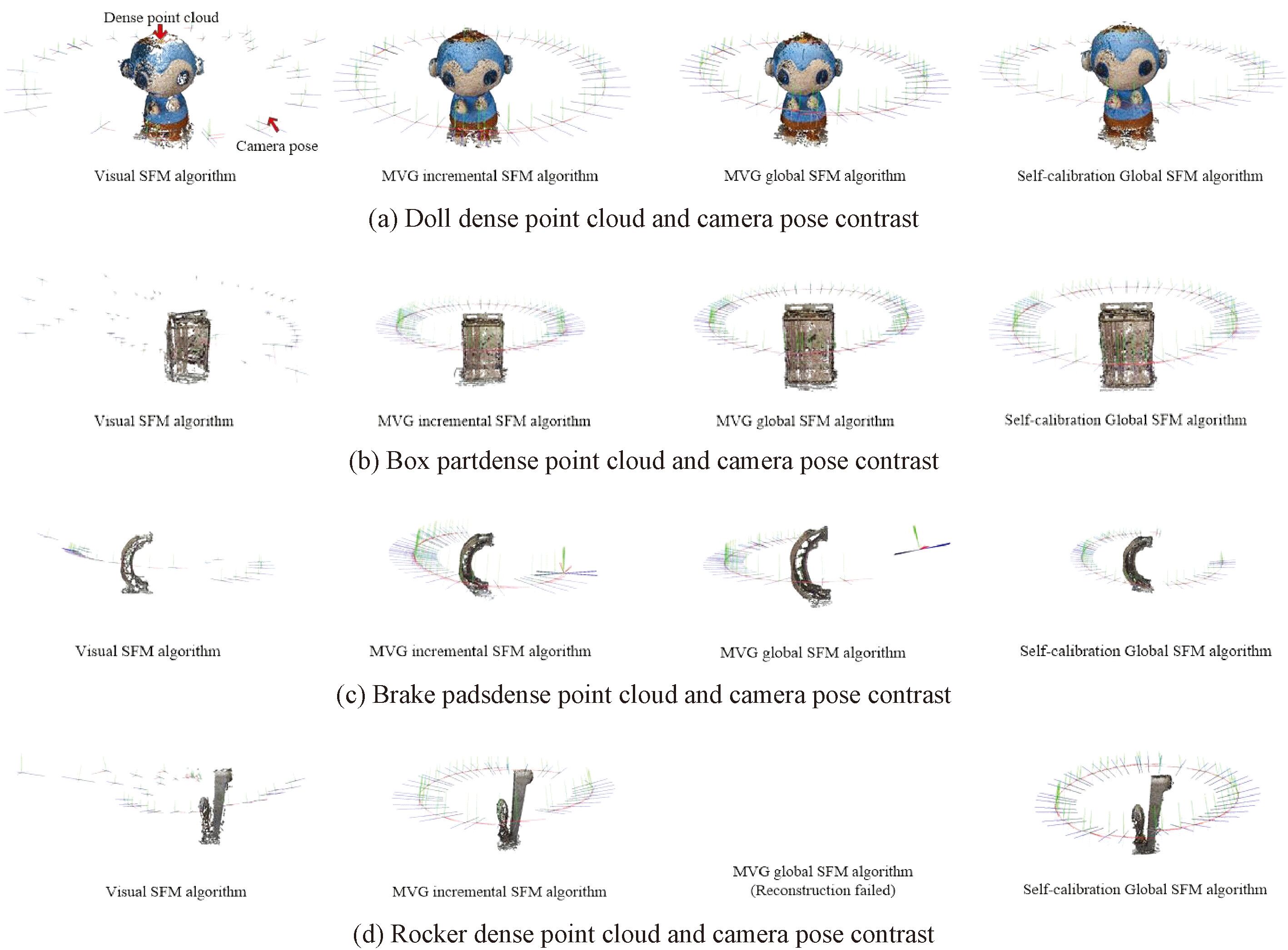
圖3 有效稠密點云和相機位姿對比圖
表2 點云信息與計算精度表
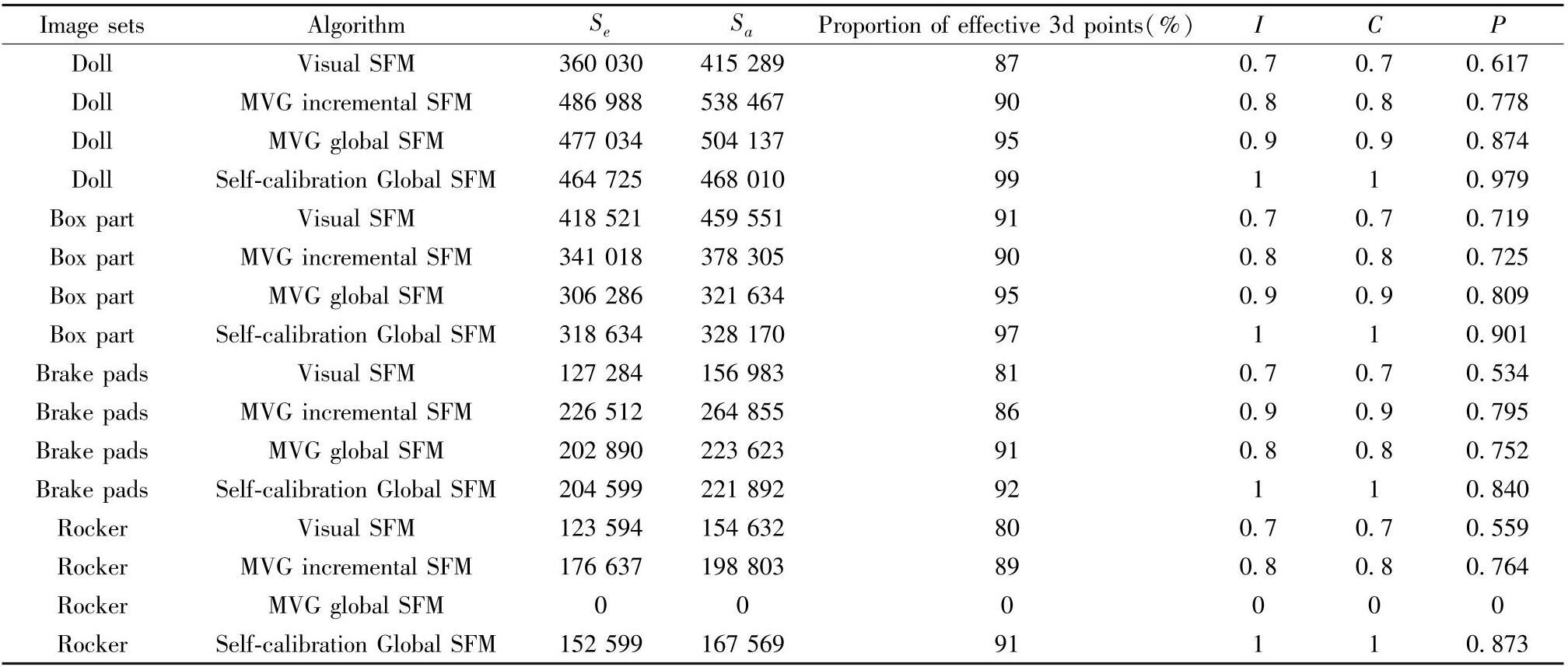
對比表2中三維點參數可知文中算法重建出的稠密三維點云中噪點數量最少,且有效三維點數量占重建三維點總數的比例最高,這是由于校正了相機三階徑向畸變參數,提高了點云中三維點的坐標精度,且全局式算法減少了光束平差的次數,避免了誤匹配對被錯誤的優化到稠密點云中。不同算法重建精度對比如圖4所示。
由圖4可見,文中算法的重建精度最高,重建精度由高到低分別為玩偶、箱體、搖桿、剎車片。玩偶圖像集中圖像數量較少,但重建后有效三維點數量和數量占比均較高,原因在于玩偶表面凹凸不平,可類比為磨損不規則且十分嚴重的零件,這增加了圖像間特征點匹配對的數量,降低了誤匹配對的數量。其余圖像集中圖像數量較多,但重建后有效三維點數量和數量占比均較低,原因在于物體表面光滑,基本無磨損且具有一定的金屬光澤,這增加了圖像間誤匹配對的數量,降低了匹配對數量,且剎車片形狀不規則,表面存在曲率快速變化的位置,使得一些圖像由于特征點過少的原因無法與其它圖像相匹配, 進一步降低了重建精度。由于上述問題導致重建精度降低時,可對具有金屬光澤的光滑曲面進行著色噴涂,并適當增加曲率快速變化位置的圖像數量,以提高重建精度。文中算法重建精度相較MVG全局算法提高10%左右,解決了全局SFM算法重建失敗的問題,魯棒性有所提高。
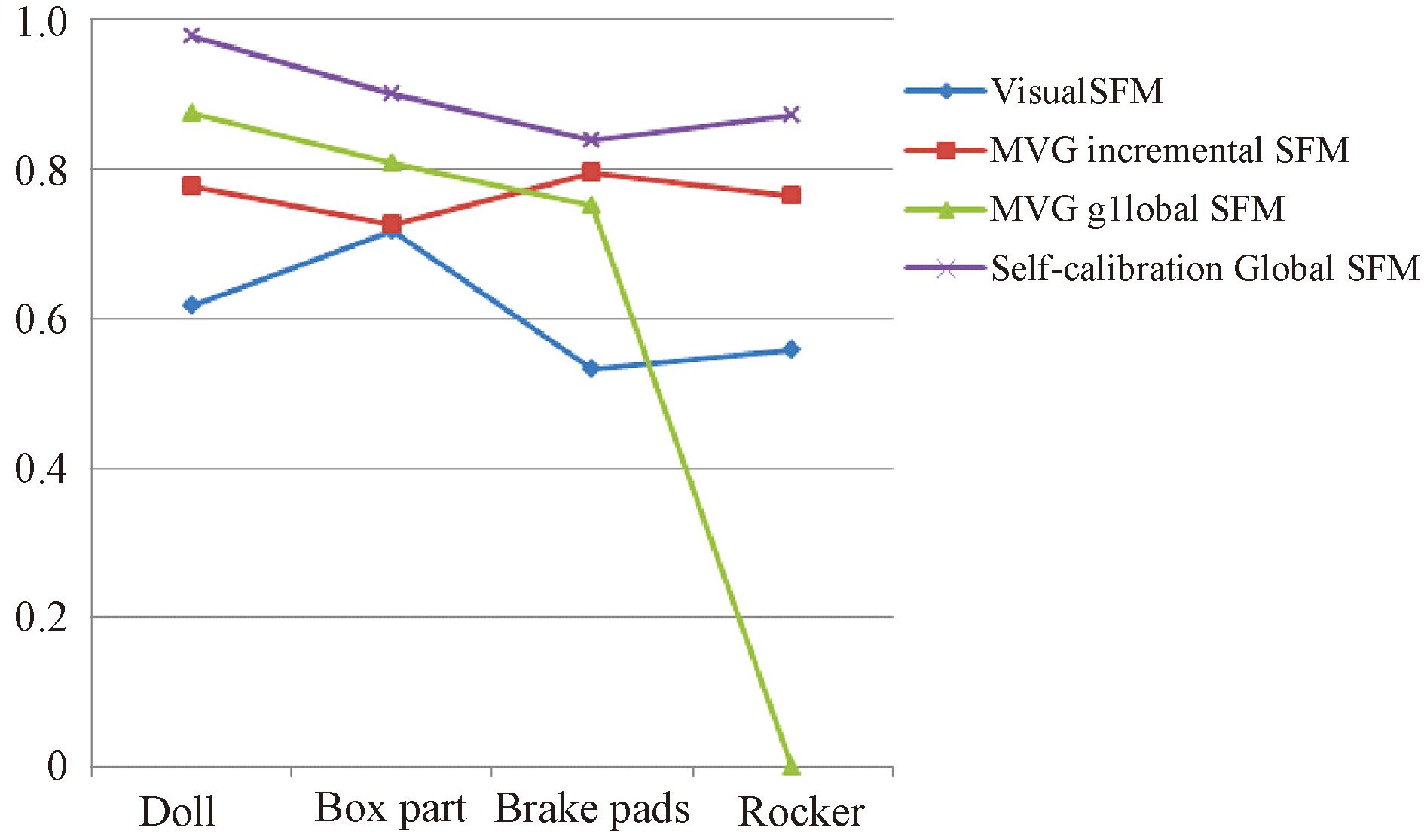
圖4 算法精度對比圖
自標定全局SFM算法,使用光束平差校準的焦距和徑向畸變值作為輸入,可以很好的適用于視頻中提取出的圖像構成的圖像集或圖片內缺少EXIF信息的情況下的重建,增強了算法的魯棒性,減少重建后稀疏點云中的噪點數量,提高了精度。
3 表面失效特征表征
表面失效特征表征包括逆向工程重建和失效特征量化兩個部分,表面失效特征表征流程如圖5所示。
3.1 逆向重建簡介
逆向工程重建[26]包括稠密點云處理、多邊形處理和曲面處理三部分。稠密點云處理包括稠密點云結構定義,降低點云中的噪點,刪除異常點等步驟; 多邊形處理主要是對稠密點云進行局部三角化和全局三角化,識別殘缺的孔,填充形成多邊形模型;曲面處理則是對多邊形模型通過三角剖分分解為多個四邊形塊,經過約束優化使其內角均接近90°且數量盡可能少,并對優化后的四邊形進行連接得到非均勻有理B樣條曲面[27]構成的三維模型。
3.2 失效特征量化
失效特征量化包括尺寸縮放、質量評估和特征參數對比三部分。
(1) 尺寸縮放。由于圖像三維重建過程中對三維點的坐標進行歸一化處理,使得逆向工程恢復的三維模型失去了原有的尺寸特征,需要進行尺寸縮放,定義尺寸縮放式(7)為
 (7)
(7)
式中,η 為尺寸縮放系數,ΔX b、ΔY b、ΔZ b 為實際兩點三維坐標差值,ΔX n、ΔX n、ΔX n 為重建三維模型相同兩點三維坐標差值。經過尺寸縮放后即可恢復物體的原有尺寸。
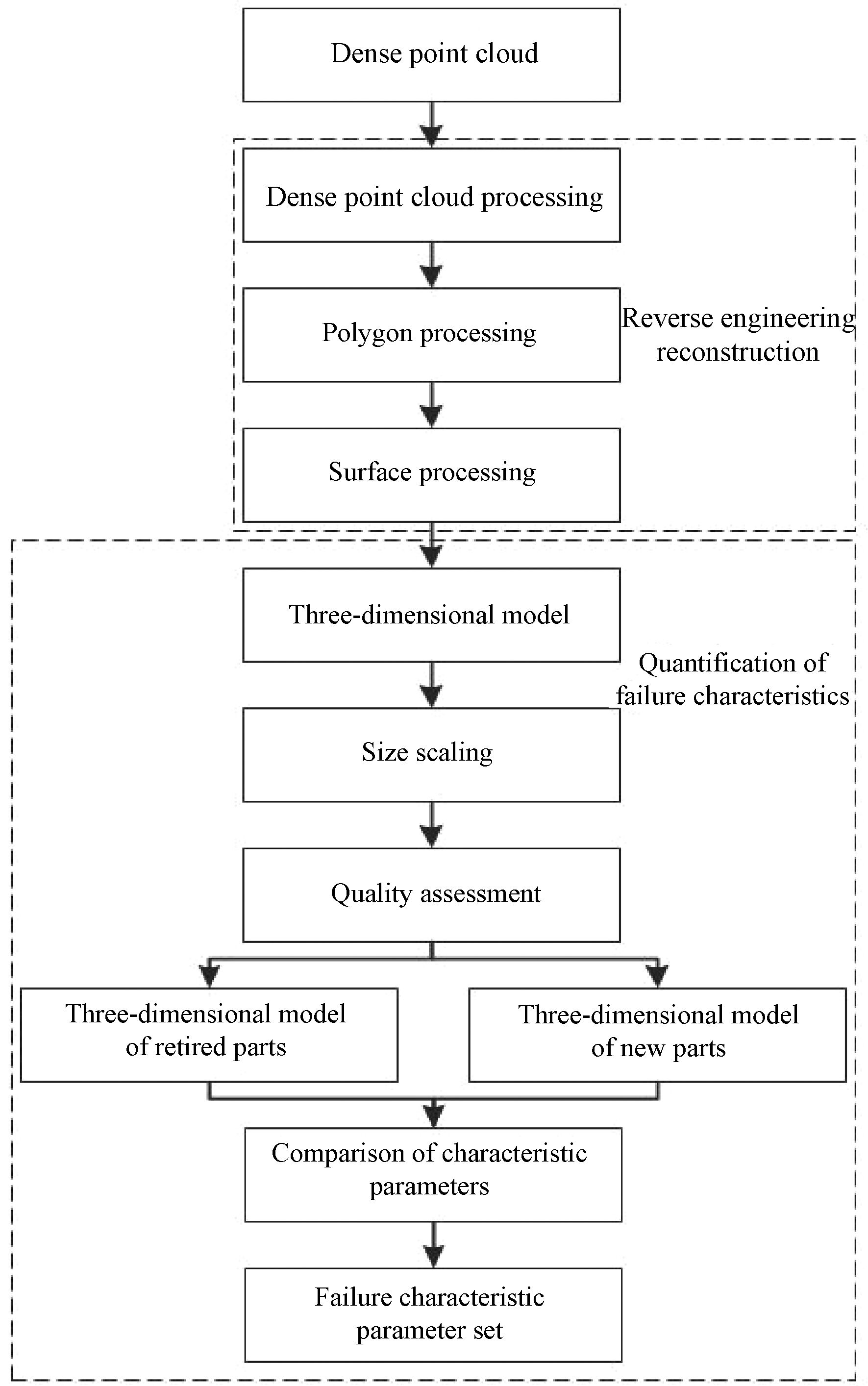
圖5 表面失效特征表征流程圖
(2) 質量評估。質量評估包括表面積、體積和質量計算,假設重建物的表面為有界曲面,則z=z(x,y),(x,y)∈D xy,其表面積計算公式為
 (8)
(8)
體積計算公式為
 (9)
(9)
式中,Ω 為重建物體的積分區域。
質量計算公式為
 (10)
(10)
式中,ρb 為重建物體的密度,I V 為重建物體的體積。通過上式可獲得重建物體的表面積、體積、質量特征。
(3) 特征參數對比。參數特征對比旨在比較退役零件特征參數與全新零件特征參數,文中分為兩種情況,當已有全新零件的標稱三維模型時直接比較特征參數,對比量化退役零件失效特征;缺少全新零件標稱三維模型時,應用文中所提方法獲取全新零件的標稱三維模型,對比量化退役失效特征,失效特征信息集為

式中,S n、I Vn 、M br 分別為全新零件的表面積、體積、質量,S r、I Vr、M br 分別為退役零件的表面積、體積、質量。信息集中包含退役零件的表面積、體積和質量的失效特征信息。
3.3 方法流程
基于圖像三維重建的退役零件表面失效特征表征并量化其失效特征包括圖像三維重建算法、重建精度評價和表面失效特征量化三個階段,方法流程如圖6所示。
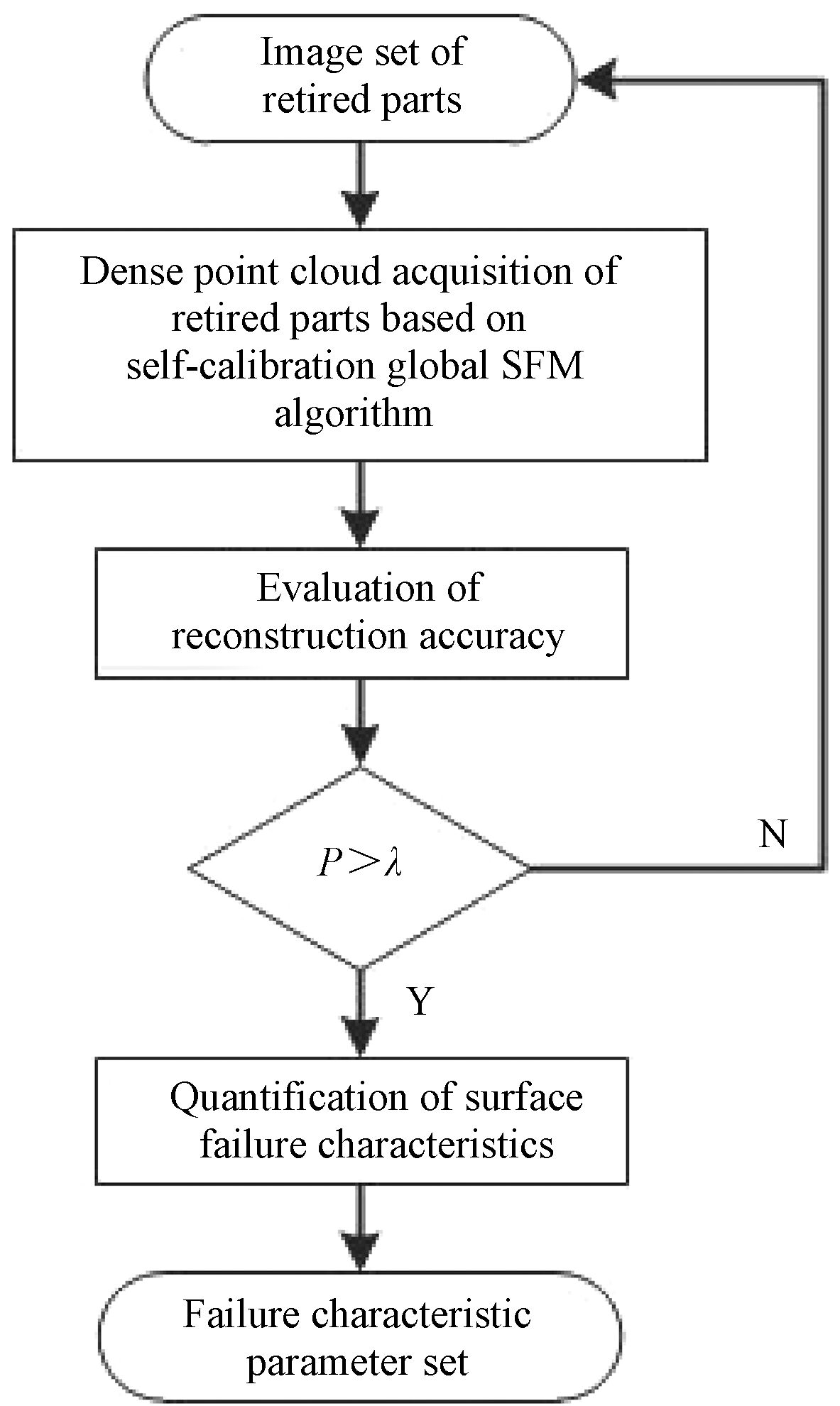
圖6 退役零件三維重建失效特征表征方法流程圖
步驟如下。
步驟1:構建退役零件圖像集。圖像集可由相機拍攝獲取,也可由視頻分解獲取。
步驟2:應用自標定全局SFM算法重建退役零件稠密點云。
步驟3:重建精度評價。根據式(6)對退役零件稠密點云進行重建精度評價。
步驟4:重建精度判斷。根據重建精度 P 的值判斷重建是否成功,當 P 值大于 λ 時認定重建精度符合要求,執行下一步,重建精度小于 λ 時認定重建失敗,須重新構建退役零件圖像集再次重建。 λ 的值根據客戶需求確定,一般大于0.8。
步驟5:表面失效特征量化。對退役零件通過逆向工程重建獲取其三維模型,根據式(7) 對三維模型進行尺寸縮放,根據式(8)~(10)求解退役零件失效特征的參數集。
4 案例分析
為了驗證文中所提基于圖像三維重建的表面失效特征表征方法的有效性,以形狀較為復雜,具有復雜的曲面、平面和孔洞的某型退役電梯導靴為例進行驗證(圖7所示)。由于前文的對比試驗已經證明文中所提自標定全局SFM算法在重建精度方面優于其它算法,此處不再進行精度對比試驗。
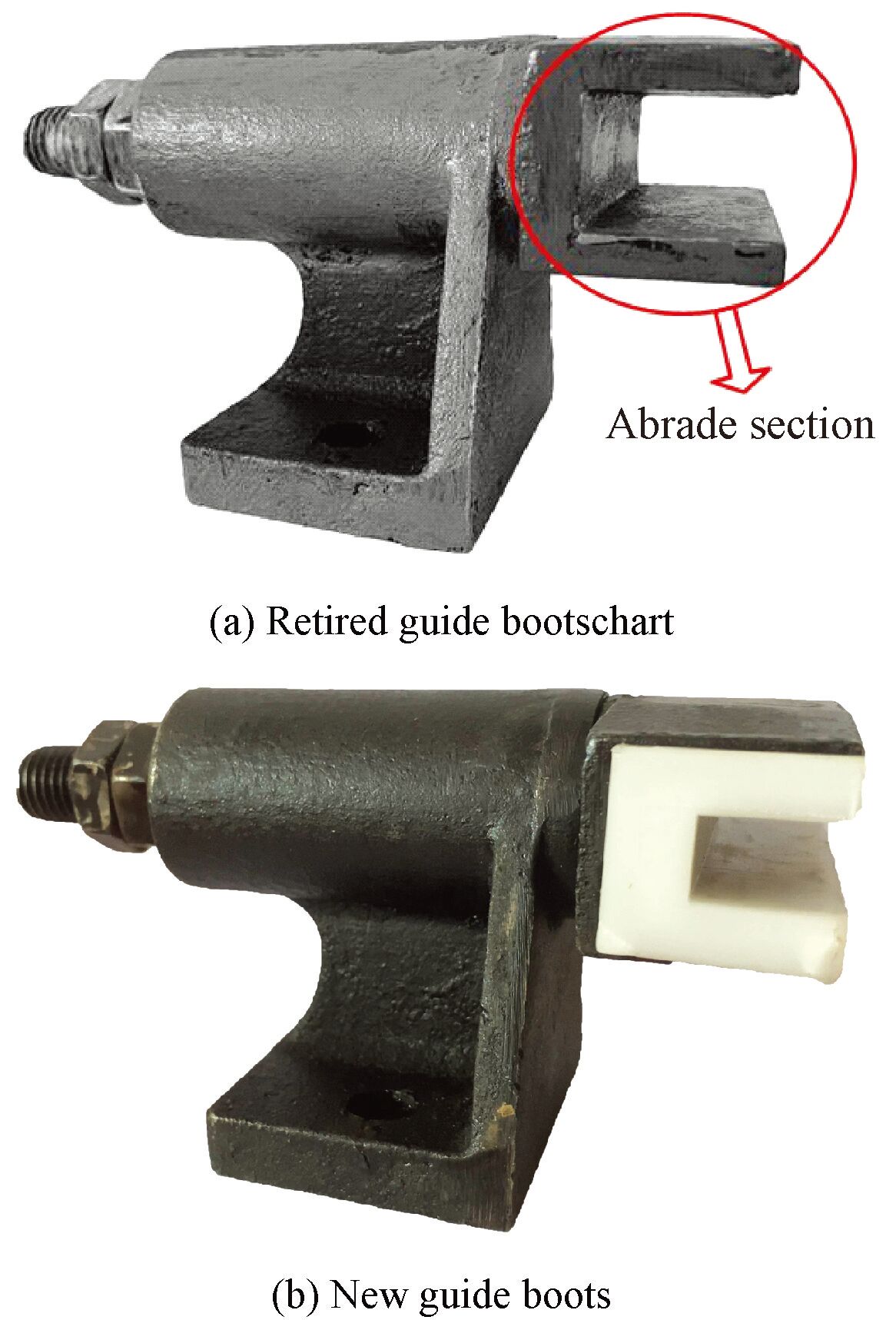
圖7 退役和全新導靴實物圖
4.1 導靴圖像集獲取
由于缺乏全新導靴的三維數字化模型,故需要對退役導靴和新導靴分別進行圖像三維重建獲取其三維模型。
以圖7所示的退役和全新導靴為對象,圖7a所示退役導靴頭部具有一定程度的磨損,使用iPhone11手機拍攝采集了145張退役導靴圖片構成退役導靴圖像集,每張圖片分辨率為4 032×3 024像素, 采集158張全新導靴圖片構成全新導靴圖像集,每張圖片分辨率為4 032×2 724像素。
4.2 導靴三維重建與精度評價
應用自標定全局SFM算法分別對退役導靴圖像集和新導靴圖像集進行相機自標定,獲取相機焦距和三階徑向畸變參數,應用全局SFM算法重建其稀疏點云,應用CMVS/PMVS算法獲取退役導靴和新導靴的稠密點云。
將退役導靴和新導靴的稠密點云信息代入點云精度評價式(6) 進行精度評價,其計算結果如表3所示。
表3 導靴點云信息與計算精度表

此處,根據客戶需求設 λ=0.85,由表3知退役導靴和新導靴的重建精度均大于0.85,滿足精度要求,可以進行表面失效特征量化。
4.3 失效特征量化
對退役導靴和全新導靴的稠密點云進行三維重建,經多邊形和曲面處理后得到退役導靴和新導靴的三維模型如圖8所示。
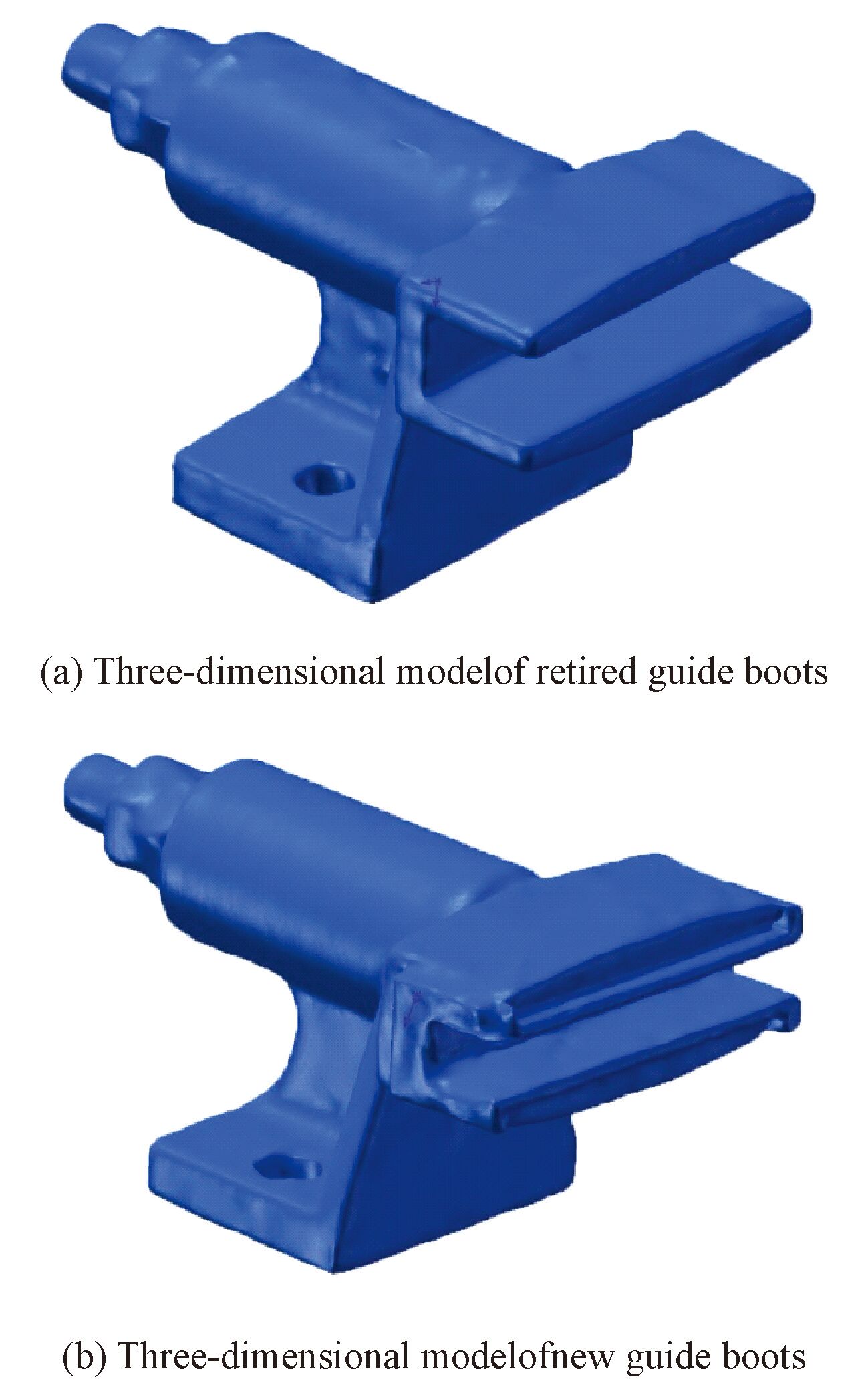
圖8 導靴三維模型
由圖8可知,該方法基本重建出了導靴的復雜曲面、平面和孔洞等細節特征。
根據式(7) 對重建后的三維模型進行尺寸縮放,經計算得出尺寸縮放系數為5.6。該導靴材料為灰鑄鐵,根據式(8)~(10)對其進行質量評估,獲取其特征參數和退役導靴失效特征的參數集,具體如表4所示。
表4 失效特征信息對比
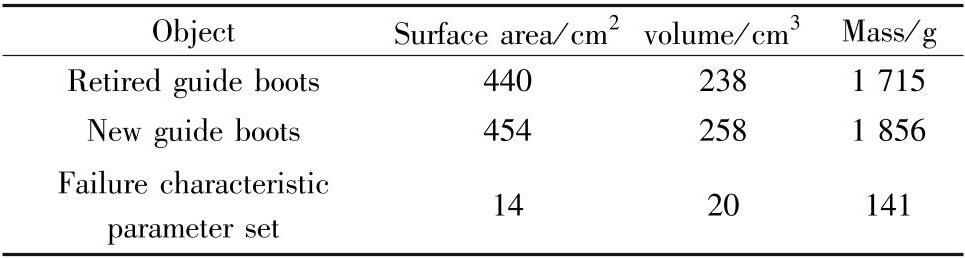
由表4可知,退役導靴質量為1 715g,新導靴質量為1 856g,對退役導靴和新導靴實物進行質量測量,其質量分別為1 783.8g和1 916.4g,計算得退役導靴重建精度為96.2%,新導靴重建精度為96.8%。
對標退役導靴和新導靴的三維模型,提取出退役導靴磨損部分的三維模型,如圖9所示。
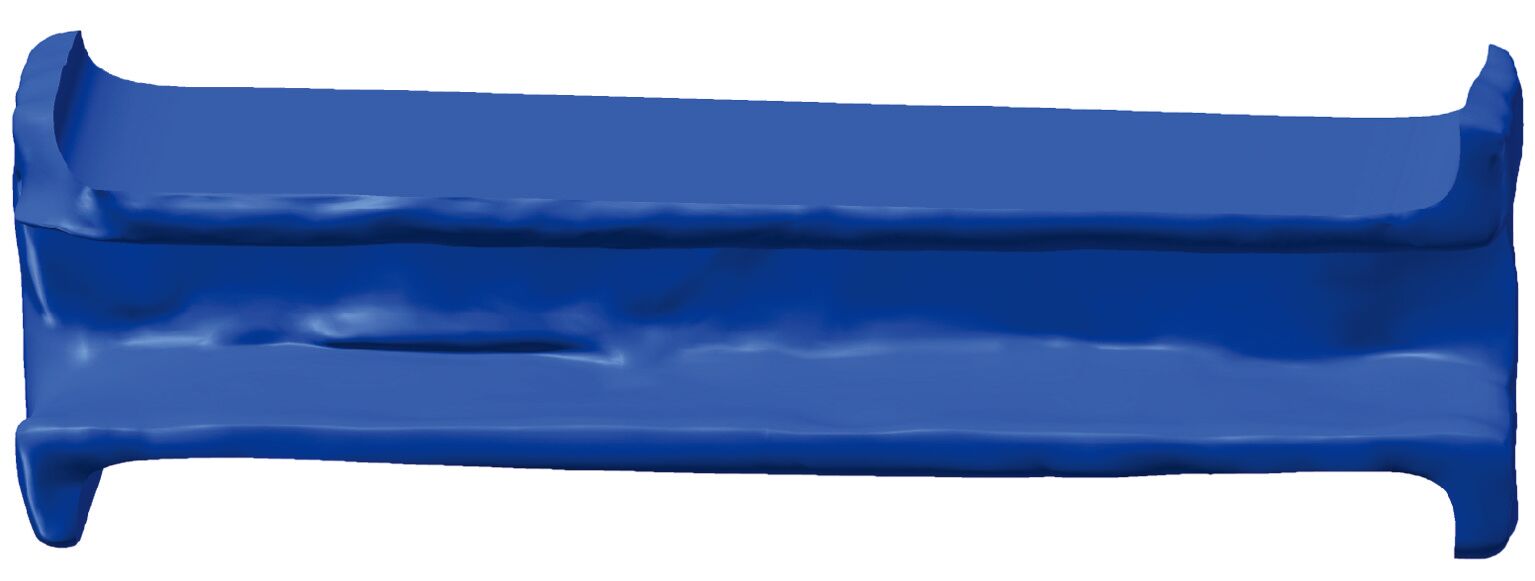
圖9 導靴磨損部位三維模型圖
對其精確形位尺寸進行評估,其質量為138.5g,體積為19.2cm 3,表面積為89.1cm 2,與實際測量的質量132.6g進行比較,獲得重建精度為95.7%。
上述計算結果快速精確地量化了導靴的失效特征,可為導靴的可再制造性判斷和再制造工藝路線規劃提供數據支撐。
5 結論
(1) 提出了自標定全局SFM算法,在構建退役零件圖像集的基礎上,應用光束平差法進行相機自標定,無需單獨標定相機,提高了點云坐標精度和相機位姿估計的準確度,降低了稠密點云中的噪點數量。
(2) 以重建有效三維點數量占比、點云完整度和相機位姿準確度為評價指標,建立退役零件重建精度評價模型,實現了對不同形狀物體重建精度的準確評價,為能否進一步表征退役零件失效特征提供理論依據。
(3) 提出了一種基于圖像三維重建的退役零件失效特征表征方法,實現了退役零件表面失效特征的高效量化表征,節約成本,獲取了退役零件三維模型,可為退役零件再制造評價與修復提供數據支持。
參考文獻
[1] 徐濱士.新時代中國特色再制造的創新發展[J].中國表面工程,2018,31(1):1-6.
XU B S.Innovation and development of remanufacturing with Chinese characteristies for a new era [J].China Surface Engineering,2018,31(1):1-6.(in Chinese)
[2] 徐濱士,董世運,史佩京.中國特色的再制造零件質量保證技術體系現狀及展望[J].機械工程學報,2013,49(20):84-90.
XU B S,DONG S Y,SHI P J.States and prospects of China characterised quality guarantee technology system for remanufactured parts [J].Journal of Mechanical Engineering,2013,49(20):84-90.(in Chinese)
[3] FU Y D,HU P,TURNER J A,et al.Ultrasonic flaw detection for two-phase Ti-6A1-4V based on secondary scattering[J].NDT and E International,2019,102(MAR):199-206.
[4] WANG W S,QU Z L,ZHENG Z S,et al.Analysis and design of coil-based electromagnetic-induced the rmoacoustic for rail internal-flaw inspectio-n [J].IEEE Transactions on Intelligent Transportati-on Systems,2019,20(7):2691-2702.
[5] KIM K S,KANG S Y,KIM W S,et al.Improvement of radiographic visibility using an image restoration method based on a simple radiographic scatering model for X-ray nondestructive testing[J].N-DT andE International,2018,98:117-122.
[6] 張秀芬,高云飛.退役機械零部件多維遞階再制造性評價方法[J].浙江大學學報,2020,54(5):954-962.
ZHANG X F,GAO Y F.Multi-dimensional hierar-chical remanufacturability evaluation method for e-nd-of-life mechanical parts [J].Journal of Zhejiang University,2020,54(5):954-962.(in Chinese)
[7] ZHANG X,CUI W,LI W,et al.A hybrid process integrating reverse engineering,prerepair processing,additive manufacturing,and material testing for component remanufacturing[J].Materials,2019,12(12):1961.
[8] 畢天騰,劉越,翁冬冬,等.基于監督學習的單幅圖像深度估計綜述[J].計算機輔助設計與圖形學學報,2018,30(8):1383-1393.
BI T T,LIU Y,WENG D D,et al.Survey on supervised learning based depth estimation from a single image[J].Journal of Computer-Aided Design and Computer Graphics,2018,30(8):1383-1393.(in Chinese)
[9] XU J,WANG K,GAO M,et al.Biomechanical performance design of joint prosthesis for medical rehabilitation via generative structure optimization [J].Computer Methods in Biomechanics and Biomedical Engineering,2020,23(15):1-17.
[10] JEON H G,SURH J,IM S,et al.Ring differencefilter for fast and noise robust depth from focus [J].IEEE Transactions on Image Processing,2019,29:1045-1060.
[11] 程亞楠,劉曉東,張東升,等.利用測深側掃數據和明暗恢復形狀方法實現地形修正[J].儀器儀表學報,2019,40(7):159-168.
CHENG Y N,LIU X D,ZHANG D S,et al.R-ealization of terrain correction utilizing bathymetric sidescan data and shape from shading methods [J].Chinese Journal of Scientific Instrument,2019,40(7):159-168.(in Chinese)
[12] 張洪鑫,王明珠,仇浩然,等.基于單目圖像序列的鑄件三維重建方法[J].中國機械工程,2018,29(23):2799-2803.
ZHANG H X,WANG M Z,QIU H R,et al.3Dreconstruction method of castings based on monocular image sequences [J].China Mechanical Engineering,2018,29(23):2799-2803.(in Chinese)
[13] YU Y J,WANG G F,ZHAO J.FI-SIFT algorithm for exposing image copy-move forgery with reflection attacks[J].International Journal of Network Security,2020,22(2):183-190.
[14] HASSANIN A A I M,El-SAMIE F E A,BANBY G M E.A real-time approach for automatic defect detection from PCBs based on SURF features and morphological operations [J].Multimedia Tools and Applications,2019,78(24):34437-34457.
[15] MUKHERJEE P,LALL B.Saliency and KAZE features assisted object segmentation [J].Image and Vision Computing,2017,61:82-97.
[16] WANG N N,GAO X B,LI J.Random samplingfor fast face sketch synthesis[J].Pattern Recognition,2018,76:215-227.
[17] 陳輝,楊劍,黃曉銘,等.基于多視圖立體視覺的沙堆三維尺寸測量研究[J].計量學報,2019,40(3):403-408.
CHEN H,YANG J,HHUANG X M,et al.Research on 3D measurement of sand pile based on multi view stereo vision[J].Acta Metrologica Sinica,2019,40(3):403-408.(in Chinese)
[18] 董建偉,李海濱,孔德明,等.基于多視圖立體視覺的煤場三維建模方法研究 [J].燕山大學學報,2016,40(2):136-141.
DONG J W,LI H B,KONG D M,et al.Research on 3D modeling of coal field based on multi-view stereo vision method [J].Journal of Yanshan University,2016,40(2):136-141.(in Chinese)
[19] 魯晨曦.基于圖像的全局SFM三維模型重建方法研究與實現[D].成都:電子科技大學,2017.
LU C X.Image-based three-dimensional model re-constructionUsing global structure from motion [ D].Chengdu:University of Electronic Science and Technology of China,2017.(in Chinese)
[20] MOISAN L,MOULON P.Automatic homographicregistration of a pair of images,with a contrario elimination of outliers[J].Image Processing on Line,2012(2):56-73.
[21] ZHANG Z Y.Flexible camera calibration by vie-wing a plane from unknown orientations [ C ]//Seventh IEEE International Conference on Computer Vision.IEEE,1999.
[22] MOULON P,MONASSE P,MARLET R.Adapti-ve structure from motion with a contrario model estimation [ C]//Computer Vision-ACCV 2012.
ACCV,2012.
[23] 馮發杰,丁亞洲,吏軍平,等.使用顯著性劃分的機載激光雷達點云濾波[J].紅外與激光工程,2020,49(8):26-34.
FENG F J,DING Y Z,SHI L J,et al.AirborneLiDAR point cloud filtering using saliency divisi-on [J].Infrared and Laser Engineering,2020,49(8):26-34.(in Chinese)
[24] 任仲賀,武美萍,唐又紅,等.機械設備零部件再制造評價點陣圖模型及應用 [J].中國表面工程,2018,31(6):143-152.
REN Z H,WU M P,TANG Y H,et al.Dot matrix model of remanufacturing evaluation for mechanical equipment parts and its application [J].China Surface Engineering,2018,31(6):143-152.(in Chinese)
[25] WU C C.Towards linear-time incremental structure from motion [C]//3DV-Conference,2013 Intern-ational Conference on IEEE Computer Society,2013.
[26] FLETCHER Y G,GLOTH T,EDELSBRUNNER H,et al.Methods,apparatus and computer program products that reconstruct surfaces from data po-int sets[P].US:US7023432,2006-04-04.
[27] 黃海博,孫文磊,張冠,等.基于NURBS曲面的汽輪機葉片激光熔覆再制造路徑規劃[J].中國表面工程,2018,31(5):175-183.
HUANG H B,SUN W L,ZHANG G,et al.Pathtrajectory of laser cladding remanufacturing for turbine blade based on NURBS surface [J].China Surface Engineering,2018,31(5):175-183(in Chinese).
免責聲明:本網站所轉載的文字、圖片與視頻資料版權歸原創作者所有,如果涉及侵權,請第一時間聯系本網刪除。
-
標簽: 圖像三維重建, 由運動恢復形狀 (SFM), 退役零件, 失效特征表征, 自標定

官方微信
《中國腐蝕與防護網電子期刊》征訂啟事
- 投稿聯系:編輯部
- 電話:010-62316606-806
- 郵箱:fsfhzy666@163.com
- 中國腐蝕與防護網官方QQ群:140808414

“海洋金屬”——鈦合金在艦船的

腐蝕與“海上絲綢之路”