



海洋是生命的搖籃、資源的寶庫、交通的要道甚至是兵戎相見的戰(zhàn)場,人類從未停止過對海洋的探索。但海洋環(huán)境復(fù)雜多變、海底壓力巨大,千百年來深海對于人類來說依然是神秘的。深海世界的那些尖端科技也是令人嘆為觀止的。
01中國核潛艇最深能潛多少米?
中國核潛艇到底最深能潛多少米呢?這個問題長期以來一直困擾著西方軍事觀察者,由于核潛艇的最大潛深能力直接關(guān)系到潛艇的作戰(zhàn)性能,世界各國包括中國在內(nèi)都對自己核潛艇的潛深數(shù)據(jù)進行了保密措施,這些措施包括故意模糊具體數(shù)值、甚至包括釋放虛假信息來迷惑對手。不過,由于潛艇潛深由該國特種鋼技術(shù)的強度水平來決定,因此西方媒體常常通過研究中國特種鋼材來確定中國核潛艇的潛深能力。2013 年,中國新聞媒體開始曝光中國早期核潛艇部隊,其中一篇關(guān)于中國核潛艇深潛試驗遇漏水險情的報道引人關(guān)注。據(jù)該報道稱,1988 年 4 月,中國某型核潛艇開始執(zhí)行極為危險的最大潛深試驗。
【鷹眼圖說軍事 海外評中國欄目第 235 期】文章稱,某型核潛艇帶著130 多名艇員和 50 多名軍地參試人員開始向深海潛航,“100 米、150 米、200 米……一切正常。當潛艇到 230 米時,艇內(nèi)陸續(xù)發(fā)出響聲和出現(xiàn)漏水,個別支撐角鋼彎曲”。最后,當核潛艇最終下潛到 300 米時,艇體不再發(fā)出響聲,漏水亦未加劇。指揮人員在確認各艙水密情況良好后,才下令上浮。據(jù)中國媒體報道稱,由于承載著巨大壓力的核潛艇在大角度艉傾調(diào)整時,會因引力作用下沉約兩米深度再加速上浮,所以中國核潛艇也因此成功創(chuàng)造 302 米的下潛紀錄。

據(jù)悉,為滿足大潛深潛艇主船體的建造要求,俄、美、日等國已采用了 屈 服 強 度 為 900MPa 至 1080MPa 級超高強度潛艇耐壓殼體用鋼。美國研制 的 HY100 鋼、HY130 鋼 和 HSLA100鋼等應(yīng)用于艦艇制造的高強度低合金鋼,最高強度達到 950MPa 左右,這種鋼材被美國政府作為戰(zhàn)略物資,不允許擅自出口。日本上世紀 90 年代開發(fā)的 NS110 鋼屈服強度已達到了驚人的1080MPa 級,俄羅斯研發(fā)的 АБ 系列鋼最高強度甚至則達到 1175MPa 級。
目前,美俄核潛艇的最大潛深在600 米左右,作戰(zhàn)潛深在 450 至 550米之間,前蘇聯(lián)甚至制造出可以潛深1000 米的核潛艇。在高強度鋼材技術(shù)上獨步全球的日本,擁有世界上潛深能力最強的常規(guī)動力潛艇,采用日本NS110 鋼材的蒼龍級潛艇最大潛深可達500 米左右。西方媒體認為,這個數(shù)據(jù)顯然是比較接近中國第一代核潛艇實際能力,西方媒體估計,中國的第一代核潛艇最大極限潛深為 300 米左右,而戰(zhàn)斗潛深為 200 至 220 米之間。由于上世紀 70 年代,中國的特種鋼材技術(shù)十分落后,所以中國核潛艇潛深能力明顯弱于美俄兩國的核潛艇。
軍事專家雷澤先生稱,中國在上世紀 90 年代開始在高強度低合金鋼上投入大量人力物力進行攻關(guān)研究,一般認為潛深超過 300 米的潛艇可以稱之為大潛深潛艇,而潛深超過 450米的潛艇則可稱之為超大潛深潛艇。西方媒體認為,為了建造超大潛深潛艇,中國的高強度潛艇用鋼生產(chǎn)企業(yè)——鞍山鋼鐵公司和寶山鋼鐵在國家“超大深度耐壓殼體用鋼”課題先后研發(fā)出 785MPa 高強鋼和 980MPa 高強鋼 (簡稱 980 鋼) 。
據(jù)悉,前者已經(jīng)廣泛應(yīng)用于 093和 094 系列的中國第二代核潛艇和093B 第三代核潛艇上,其衍生產(chǎn)品已經(jīng)裝備中國遼寧號航母和首艘國產(chǎn)航母上。而后者則是中國第四代核潛艇——095 的主要鋼材料。西方媒體評估認為,目前,中國第二代和第三代核潛艇的最大作戰(zhàn)潛深在 300 至 350 米之間,而 095 達到450 至 500 米之間的水平,基本上趕上了美俄現(xiàn)役核潛艇的平均水平,在實戰(zhàn)中并不吃虧。
02中國新型萬米深潛器用特殊材料 超蛟龍?zhí)栆淮?/strong>
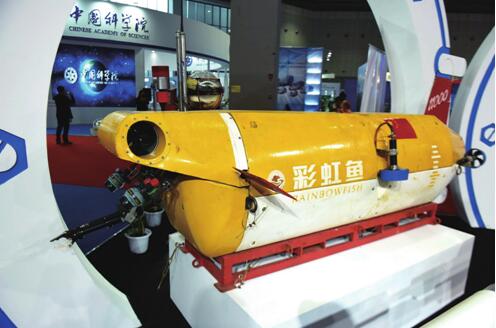
2015 年初,由上海海洋大學(xué)深淵科學(xué)技術(shù)研究中心采用“民間資金 + 國家支持”新模式推動的 11000 米全海深載人深潛器“彩虹魚”號研制項目,進展十分順利,已經(jīng)取得了顯著的成效。
上海海大深淵科研中心主任崔維成指出,我國自行研制的“蛟龍”號載人潛水器成功下潛至 7062 米深度并開展作業(yè),標志著我國具備了載人到達全球99% 海底的作業(yè)能力。但中國若要在深潛方面繼續(xù)保持世界領(lǐng)先水平,成為一個無可爭議的海洋高技術(shù)強國,必須盡快研制成功萬米級全海深載人潛水器。
據(jù)崔維成介紹,上海海大深淵科研中心建設(shè)的深淵科學(xué)技術(shù)流動實驗室項目主要包括 3 個 11000 米的著陸器,一個11000 米的自主 / 遙控式復(fù)合型無人潛水器,一個 11000 米并可供 3 人下潛的載人潛水器以及一艘 4000 噸級的新型科考母船。
該項目于 2013 年年初正式啟動,截至目前,第一臺 11000 米著陸器的國內(nèi)外訂購設(shè)備已經(jīng)全部到貨,計劃于2015 年春節(jié)后進入總裝建造階段,并計劃在 2015 年下半年赴南海開展 3000 米級的海上試驗;另外兩臺 11000 米作業(yè)型著陸器的研制將在2015年完成。 同時,11000 米無人潛水器的設(shè)計和所有設(shè)備的訂貨工作也已完成。此外,科考母船的設(shè)計工作已全面展開,2015 年春節(jié)后將開工建造, 計劃于2016年6月底完工;11000 米載人深潛器的關(guān)鍵技術(shù)研究工作也在有條不紊地向前推進。
“蛟龍”號載人潛水器屬于第二代潛水器。而上海海大深淵科研中心研制的 11000 米全海深載人深潛器屬于第三代深潛器。兩者在上浮與下潛速度和模式方面有顯著的不同,后者的研發(fā)難度更大,海上試驗的風(fēng)險也更高。據(jù)崔維成介紹,該中心在開展 11000 米全海深載人潛水器關(guān)鍵技術(shù)攻關(guān)時,充分吸取“蛟龍”號直接海試的高風(fēng)險教訓(xùn),先研制了 3 臺全海深著陸器和 1 臺全海深無人潛水器,并將著陸器和無人潛水器作為全海深載人潛水器關(guān)鍵技術(shù)的海上驗證平臺,也可以作為全海深載人潛水器海試時的救援保障手段,還可作為今后海上作業(yè)的協(xié)同裝備。其中,3 個著陸器的重要使命是作為無人潛水器的試驗平臺。無人潛水器的主要使命是作為全海深載人深淵器的試驗平臺,驗證后續(xù)開發(fā)的全海深載人深淵器的無動力上浮下潛技術(shù)、水下控制技術(shù)、觀通技術(shù)、推進技術(shù)、水下配電技術(shù)等關(guān)鍵技術(shù)。
該無人潛水器也是載人潛水器的試驗載體,除載人艙技術(shù)、生命支持技術(shù)外,載人潛水器其他關(guān)鍵設(shè)備和技術(shù)都通過該平臺搭載,在萬米海深環(huán)境下實際運轉(zhuǎn)并進行測試。
作為載人深潛器的重要組成部分,11000 米載人深潛器載人艙的材質(zhì)選用是研發(fā)工作中的一大難題。崔維成介紹,“蛟龍”號的載人艙采用 TC4 鈦合金全焊接制造,但如果用該牌號鈦合金來制造 11000 米深潛器的載人艙,其艙壁厚度將超過 110 毫米,國內(nèi)外均難以制造。
經(jīng)過深入研究,并參考國外的經(jīng)驗,該中心決定,采用馬氏體高強度鎳鋼制造11000 米載人深淵器的載人艙。該型號鋼的強度比 TC4 鈦合金高 1 倍。同時,采用完全鍛鑄造方式而非傳統(tǒng)的焊接式制造載人艙。
按照上海海大深淵科研中心的計劃,11000 米載人深潛器的研制將分兩期完成。首期研制載人艙,二期再制造其它設(shè)備。俄羅斯和芬蘭在這方面擁有較多的經(jīng)驗。此前,兩國通過合作,采用超高強度的馬氏體鎳鋼成功地制造了兩個“和平”號深潛器載人艙。該中心在利用上海彩虹魚海洋科技有限公司資助的資金,率先開展采用馬氏體鎳鋼制造載人艙的設(shè)計工作的同時,積極與外方接洽聯(lián)合開展設(shè)計和關(guān)鍵技術(shù)攻關(guān)。
此外,國產(chǎn)化制造馬氏體鎳鋼載人艙的可行性研究和立項工作也正在緊鑼密鼓地推進之中。崔維成表示,希望有關(guān)政府部門能助他們一臂之力,盡早制造出全海深載人潛水器。
03中國將研究建立深海空間站 深探萬米油氣資源

國務(wù)院印發(fā)的《“十三五”國家科技創(chuàng)新規(guī)劃》(下稱《規(guī)劃》)已正式發(fā)布。這是我國首次以“國家”命名科技創(chuàng)新規(guī)劃。規(guī)劃提出 12 項主要指標,多項指標在未來五年將翻番或有重大躍升。其中,國家綜合創(chuàng)新能力世界排名從現(xiàn)在的 18 位提升到第 15 位,這意味著中國進入全球公認的創(chuàng)新型國家行列。多項創(chuàng)新指標將翻番或躍升《規(guī)劃》
強調(diào),堅持創(chuàng)新是引領(lǐng)發(fā)展的第一動力,以深入實施創(chuàng)新驅(qū)動發(fā)展戰(zhàn)略、支撐供給側(cè)結(jié)構(gòu)性改革為主線,確保如期進入創(chuàng)新型國家行列,為建成世界科技強國奠定堅實基礎(chǔ)。在規(guī)劃描繪的未來五年科技創(chuàng)新發(fā)展藍圖中,我國科技實力和創(chuàng)新能力將大幅躍升。未來五年,我國全社會研發(fā)投入強度將進一步加大,目標是到 2020 年達到 2.5%。現(xiàn)在我國全社會研發(fā)投入約合 2000 多億美元,美國是 4000 多億美元。過去十年,中國全社會研發(fā)累計投入相當于美國的六分之一。
特別關(guān)注深空、 深海、 深地、 深藍 《規(guī)劃》提出,“十三五”期間,要在實施好已有國家科技重大專項的基礎(chǔ)上,面向 2030 年再部署一批體現(xiàn)國家戰(zhàn)略意圖的重大科技項目。新部署的 15 個科技創(chuàng)新重大項目包括航空發(fā)動機及燃氣輪機、深海空間站等 6 個重大科技項目,以及煤炭清潔高效利用、智能電網(wǎng)等 9項重大工程。 其中, 深海研究、 深海移動、固定型空間站要建立深海空間站,開展深海探測與作業(yè)前沿共性技術(shù)及通用與專用型、移動與固定式深海空間站核心關(guān)鍵技術(shù)研究。研制全海深潛水器,圍繞實施深海安全戰(zhàn)略的科技需求,突破全海深 (最大深度11000米) 潛水器研制,形成 1000—7000 米級潛水器作業(yè)應(yīng)用能力。
解讀國家對顛覆性技術(shù)要有預(yù)判預(yù)警預(yù)置中國工程院院士劉德培表示,《規(guī)劃》高度關(guān)注顛覆性技術(shù)和基礎(chǔ)研究。國家對顛覆性技術(shù)要有預(yù)判、預(yù)警和預(yù)置,以此保證在未來競爭中把握主動權(quán)和擁有競爭力。科技部副部長李萌全程參與了規(guī)劃的編制。她介紹,與以往國家科技規(guī)劃不同,本規(guī)劃首次以國家科技創(chuàng)新規(guī)劃命名。“十三五”是全面建成小康社會和進入創(chuàng)新型國家行列的決勝階段。
04征服未知海底的利器——智能水下機器人
像衛(wèi)星探索宇宙空間一樣,水下機器人是人類的眼睛和手臂在海底的延伸。下面小編將帶您認識深水油氣開發(fā)的利器——水下機器人。
中國在水下機器人研究方面起步雖晚,但通過不懈努力取得了巨大技術(shù)成果。2014 年我國自主研制的 6000 米 AUV( 無纜水下機器人 )“潛龍一號”在東北太平洋多金屬結(jié)核合同區(qū)成功下潛作業(yè)、“蛟龍?zhí)?rdquo;下水、“北極 ARV”助力科考,都彰顯了我國在水下機器人領(lǐng)域的研發(fā)決心和科研技術(shù)成果。
未來 10 年將是中國水下機器人發(fā)展的關(guān)鍵期。與水下機器人最相關(guān)的三個行業(yè)是海洋油氣業(yè)、海洋漁業(yè)以及海洋礦業(yè)。
一、水下機器人向深海進發(fā)
水下機器人是工作于水下的極限作業(yè)機器人,能潛入水中代替人完成某些操作,又稱無人遙控潛水器。由于水下環(huán)境惡劣危險,人的潛水深度有限,所以水下機器人日益成為開發(fā)海洋的重要工具。
水下機器人分類
廣義上的水下機器人,也可稱作潛水器 (UnderwaterVehicles),是一種可在水下代替人,在充滿未知的海洋環(huán)境中完成某種任務(wù)的裝置。
就外形看,目前大部分水下機器人是框架式或類似于潛艇的回轉(zhuǎn)細長體。隨著仿生技術(shù)的不斷發(fā)展,仿魚類形態(tài)和運動方式的水下機器人,將會不斷發(fā)展。
根據(jù)是否載人,可將潛水器分為載人潛水器和無人潛水器。無人潛水器按照與水面支持系統(tǒng)間聯(lián)系方式的不同,可以分為有纜遙控水下機器人 (Remotely Operated Vehicle,簡稱ROV)、無纜水下機器人(Autonomous Underwater Vehicle,簡稱 AUV))兩種。有纜水下機器人都是遙控式的,根據(jù)運動方式不同可分為拖曳式、( 海底 ) 移動式和浮游 ( 自航 ) 式三種。
無纜水下機器人一般是自治式機器人(又稱智能機器人),它能夠依靠本身的自主決策和控制能力,高效率地完成預(yù)定任務(wù),在一定程度上代表了目前水下機器人的發(fā)展趨勢。
載人潛水器是由人工輸入信號操控各種動作,由潛水員和科學(xué)家通過觀察窗直接觀察外部環(huán)境。其優(yōu)點是由人工親自做出各種核心決策,便于處理各種復(fù)雜問題,但是人員面臨的危險性大。由于載人潛水器需要足夠的耐壓空間、可靠的生命安全保障和生命維持系統(tǒng),使得潛水器體積龐大、系統(tǒng)復(fù)雜、造價高昂、工作環(huán)境受限。
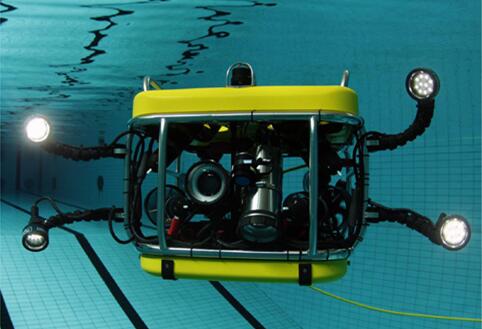
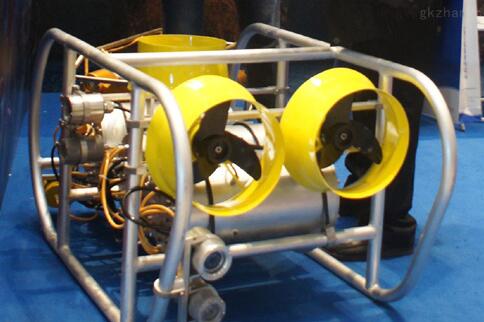
有纜水下機器人(ROV)需要由電纜從母船接受動力,且不需要人為干預(yù)。其主要由水面設(shè)備(包括操縱控制臺、電纜絞車、吊放設(shè)備、供電系統(tǒng)等)和水下設(shè)備(包括中繼器和潛水器本體)組成。潛水器本體在水下靠推進器運動,本體上裝有觀測設(shè)備(攝像機、照相機、照明燈等)和作業(yè)設(shè)備(機械手、切割器、清洗器等)。潛水器的水下運動和作業(yè),是由操作員在水面母艦上控制和監(jiān)視,電纜向本體提供動力和交換信息,中繼器可減少電纜對本體運動的干擾。人們通過電纜對 ROV 進行遙控操作,電纜如同“臍帶”一樣,對 ROV 至關(guān)重要。但細長的電纜懸在海中,也成為 ROV 最脆弱部分,大大地限制了機器人的活動范圍和工作效率。
無纜水下機器人(AUV)又稱自治水下機器人、智能水下機器人,是將人工智能、探測識別、信息融合、智能控制、系統(tǒng)集成等多方面技術(shù),集中應(yīng)用于同一水下載體上,在沒有人工實時控制的情況下,自主決策、控制完成在復(fù)雜的海洋環(huán)境中的預(yù)定任務(wù)的機器人。是從簡單的遙控式向監(jiān)控式發(fā)展,即由母艦計算機和潛水器本體計算機實行遞階控制,它能對觀測信息進行加工,建立環(huán)境和內(nèi)部狀態(tài)模型。操作人員通過人機交互系統(tǒng),以面向過程的抽象符號或語言下達命令,并接受經(jīng)計算機加工處理的信息,對潛水器的運行和動作過程進行監(jiān)視并排除故障。操作人員僅下達總?cè)蝿?wù),機器人就能根據(jù)識別和分析環(huán)境,自動規(guī)劃行動、回避障礙、自主地完成指定任務(wù)。受益于近海油氣開發(fā),我國無人有纜遙控潛水器急速放量。

二、 我國水下機器人不懈努力跨越鴻溝
我國對水下機器人的研究與開發(fā)起步較晚,從七十年代末才開始研究,相比歐美和日本,我國一直處于落后水平。
我國的水下機器人研究,是從立足軍事需求起步的。七十年代末期,中國科學(xué)院沈陽自動化研究所和上海交通大學(xué)開始從事ROV的研究與開發(fā), 合作研制了我國第一個 “海人一號” ROV,“海人一號”是我國獨立自主研發(fā)的第一臺大型水下機器人。
目前 , 我國軍用水下機器人已經(jīng)形成系列,特別是 6000m 深水機器人的問世,表明我國在此領(lǐng)域已經(jīng)取得了一定成績。
CR-01型無纜自治水下機器人
CR-01 型無纜自治水下機器人是我國于 1992 年 6 月與俄羅斯科學(xué)院海洋技術(shù)研究所合作,于 1995 年 8 月研制成功的。其體長 4.37m,寬 0.8m,它在空氣中的重量為 1305.15kg,它的最大潛深 6000m,最大水下航速 2 節(jié),續(xù)航能力 10h,定位精度為10m ~ 15m,它可在 6000m 水下進行攝像、拍照、測量海底地勢與剖面、海底沉物目標搜索和觀察、水文物理測量和海底多金屬結(jié)核豐度測量,并能自動記錄各種數(shù)據(jù)及其相應(yīng)的坐標位置。
“潛龍一號”AUV
2014 年 8 月 31 日,我國自主研制的 6000mAUV“潛龍一號”
在東北太平洋多金屬結(jié)核合同區(qū)成功下潛作業(yè),順利完成了綜合性能測試。“潛龍一號”長 4.6m、直徑 0.8m、重量為1500kg,最大工作水深 6000m,巡航速度 2 節(jié),最大續(xù)航能力24h,配有淺地層剖面儀等探測設(shè)備,可完成海底微地形地貌精細探測、地質(zhì)判斷、海底水文參數(shù)測量和海底多金屬結(jié)核豐度測定等任務(wù)。
“蛟龍”號載人潛水器
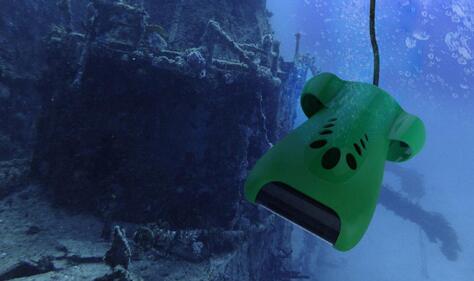
2014 年 7 月,我國“蛟龍”號載人潛水器下潛作業(yè),并對搭載的微型無人潛水器“龍珠”號進行試驗。“龍珠”號重量僅有 40kg,配有 3 部電動推進器,通過一根光纖與“蛟龍”號相連,由“蛟龍”號球艙內(nèi)的潛航員遙控控制,且自帶攝像機,可進行水下觀察和錄像,與“蛟龍”號互補形成更全面的觀測能力。在水下工作期間,“龍珠”號與“蛟龍”號按照預(yù)先規(guī)劃的協(xié)同作業(yè)流程“分工協(xié)作”、“默契配合”,完成了相互之間互動拍攝和“龍珠”號的釋放與回收等預(yù)定的工作任務(wù),形成了兩種不同類型的潛水器在水下協(xié)同作業(yè)的新模式。
“北極ARV”水下機器人
“北極 ARV”水下機器人能夠在高緯度下實現(xiàn)對冰下海冰物理特征、水文和光學(xué)特性等的自主精確同步觀測,為我國北極科考提供了一種大范圍的先進、連續(xù)、實時的冰下觀測技術(shù)手段。新一代北極 ARV 通過水下機器人攜帶光通量測量儀,可連續(xù)測量出海冰吸收的太陽輻射能的空間變化,估算出同緯度更大范圍海冰對太陽輻射能的吸收,以此計算出太陽輻射對該緯度北極海冰融化的貢獻。

三、水下機器人將何去何從
向遠程發(fā)展
太陽能自主水下機器人能解決遠程續(xù)航問題。智能水下機器人向遠程發(fā)展的技術(shù)障礙有三個:能源、遠程導(dǎo)航和實時通信。目前正在研究的各種可利用的能源系統(tǒng),包括一次電池、二次電池、燃料電池、熱機及核能源。太陽能自主水下機器人需要浮到水面給機載能源系統(tǒng)充電,而這種可利用的能源又是無限的。
向深海發(fā)展
發(fā)展優(yōu)化 6000m 水深技術(shù),成為許多國家的目標。海洋資源大多存儲于深海,6000m 以上水深的海洋面積,占海洋總面積的97%。 因此, 許多國家把發(fā)展6000m水深技術(shù)作為目標,美國、日本、俄羅斯等國,都先后研制了 6000m 級的無人潛航器。美國伍茲霍爾海洋研究所研制的深海探測器“ABE”,可在水深 6000m 的海底停留一年;日本 1993 年研制了工作水深為 11000m 的深海無人潛水器“海溝號”;中國的“潛龍一號”也具備了 6000m 深度的作業(yè)能力。

向智能型發(fā)展
增加水下機器人行為的智能水平,一直是各國科學(xué)家的努力目標。但由于目前的人工智能技術(shù)還不能滿足水下機器人智能水平增長的需要。因此,一方面,不能完全依賴于機器的智能,還需更多依賴傳感器和人的智能,打造監(jiān)控型水下機器人。另一方面,發(fā)展多機器人協(xié)同控制技術(shù),也是未來自主水下機器人的重要發(fā)展方向。
免責(zé)聲明:本網(wǎng)站所轉(zhuǎn)載的文字、圖片與視頻資料版權(quán)歸原創(chuàng)作者所有,如果涉及侵權(quán),請第一時間聯(lián)系本網(wǎng)刪除。

官方微信
《腐蝕與防護網(wǎng)電子期刊》征訂啟事
- 投稿聯(lián)系:編輯部
- 電話:010-62316606-806
- 郵箱:fsfhzy666@163.com
- 腐蝕與防護網(wǎng)官方QQ群:140808414

“海洋金屬”——鈦合金在艦船的

腐蝕與“海上絲綢之路”