
一種輕型碳纖維爬索機器人及其檢測系統研究
2018-08-28 17:47:29
作者:王曉琳,陸紹輝,李東平,覃華橋,黃漢斌,雷國肇,王雄彪 來源:柳州歐維姆結構檢測技術有限公司,廣西 柳州 545006
分享至:


0 引言
拉索是拱橋、斜拉橋、懸索橋等索類橋梁的核心構件之一 . 拉索長期暴露在空氣中,經風吹雨淋、日光照射、紫外線照射、人為損傷等因素影響,存在著外 PE 護套、內部鋼絲束或鋼絞線損傷等病害 [ 1 ] . 另一方面,由于風雨振等因素,拉索內部的鋼絲束相互摩擦,引發鋼絲磨損,嚴重者也會發生斷絲現象 . 拉索的工作狀態是橋梁是否處于安全狀態的重要標志之一 [ 2 ] . 定期對拉索體系進行檢測是有必要的 .
以往在工程中常采用卷揚機拖動檢修車的檢測方式或采用登高車對拉索的人工檢測方法 . 該類方法容易對拉索 PE 保護層造成破壞;且檢測人員處于高空作業,容易造成安全事故,而且需要封閉交通 . 隨著機器人技術的進步,開發用于橋梁拉索檢測的智能機器人, 成為了必然 . 近年來上海交通大學 [ 3 ] 、 東南大學 [ 4 ] 、武漢橋科院 [ 5 ] 等高校、科研院所均對爬索機器人進行了研發,但普遍存在著自重大,續航差,需要外接電源等問題,不能滿足快速檢測的工程應用需求 .

本文研究的爬索機器人通過對設計材料的改進,采用自重很輕的碳纖維材料,保證了機器人的續航能力,且方便現場安裝 . 通過增加索力檢測裝置,爬索機器人攜帶無線加速度傳感器到拉索中間部位后再測量拉索索力,該方法比原先在拉索預埋管上部安裝加速度傳感器測量索力更為精準 . 機器人搭載高清攝像裝置,可實現拉索表面和橋塔拉索連接處病害的外觀檢測 . 自帶的漏磁檢測設備可以對拉索內部銹蝕斷絲進行精準檢測 .
1 爬索機器人及其檢測系統研制
1.1 系統整體結構
爬索機器人包括一對主動輪和一對從動輪,采用雙邊夾緊 4 輪雙電機驅動形式 . 利用兩半式輕型碳纖維框架結構,通過 4 對聯接臂進行聯接,不僅方便在拉索上裝卸,而且還可根據拉索不同直徑進行調整 . 用拉伸彈簧和擺臂支撐組成柔性壓緊機構,始終保持每對滾輪夾緊索體形成爬行所需摩擦力 . 主、從動輪設計為 U 形,可增大接觸面,自行對中糾偏 . 并根據不同規格拉索,配套相應規格尺寸的輪子 . 爬索機器人上、下兩端面四周共有 4 對支撐萬向滾輪,能防止輪體偏離索體造成鎖死現象 . 在機器人的前端和尾部均安裝有紅外測距裝置,防止機器人在運行中撞擊拉索兩端預埋導管而損壞,將拉索檢測儀器安裝或搭載于爬索機器人上,利用高能鋰電池作為供電電源,提升機器人的續航能力,通過操作控制單元配合各子系統實現橋梁拉索 PE 外觀、內部斷絲銹蝕檢測以及拉索索力測量 . 爬索機器人示意圖如圖 1 所示。
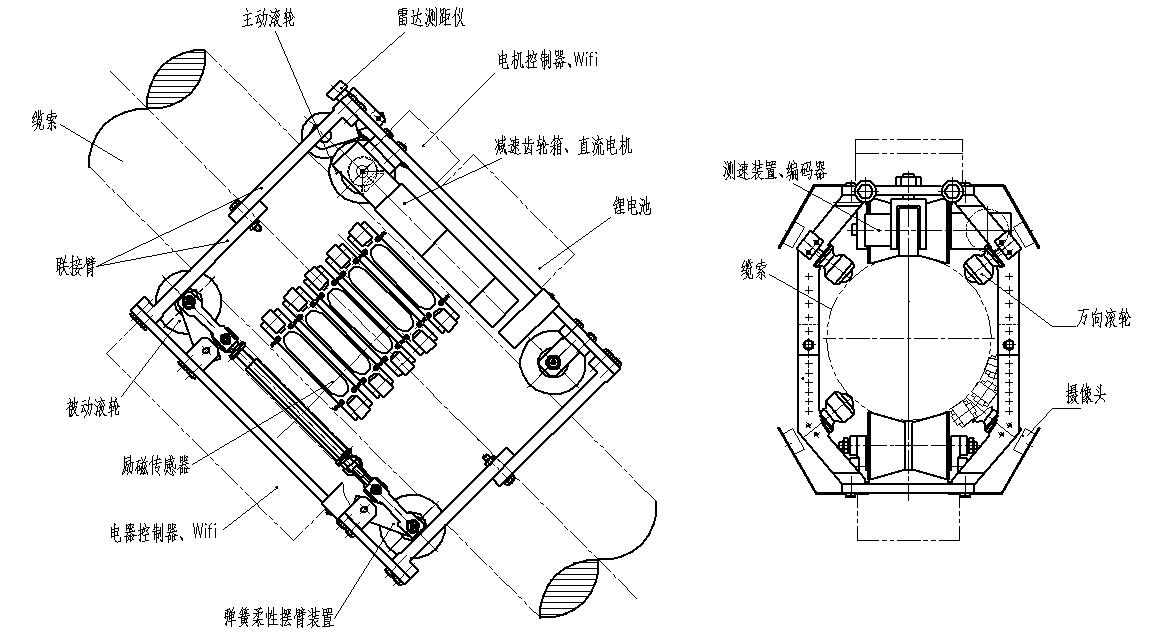
圖 1 爬索機器人示意圖
使用時,根據被測拉索直徑的大小來相應的調整聯接臂及拉伸彈簧的距離,以提供適合爬行所需的摩擦力 . 爬索機器人可按照上位機軟件系統的指令以及設定的速度在拉索上運行,當到達拉索末端時能自動返回 . 還能在拉索上通過地面控制自由地移動并到達檢測人員所要觀測的位置,以便進行局部更加細致的觀察和索力測量 . 利用視頻采集單元采集拉索外部 PE 保護層表面全方位的高清視頻圖像,用漏磁法拉索銹蝕檢測單同步進行拉索內部斷絲銹蝕檢測,采用高分辨率編碼器準確的定位拉索病害位置,通過無線傳輸信號到橋面上位機 . 再由上位機軟件系統自動識別出 PE 損傷面積,斷絲銹蝕狀態及病害位置 。
1.2 動力裝置設計
機器人在纜索上運動由兩副( 4 只)滾輪提供對纜索的附著力,機器人的全部重力(自重和載重)由這 4 只滾輪承載 . 設機器人處于靜止狀態,分別考慮垂直吊桿監測和有一定角度的斜拉索檢測時,對一只滾動輪進行受力分析 . 如圖2 所示。
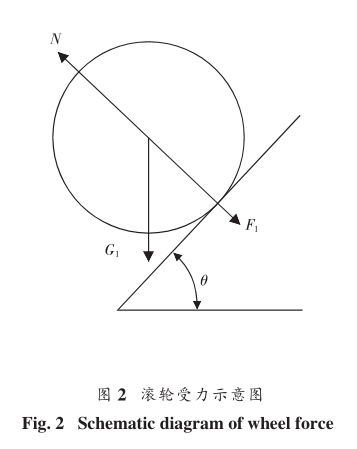
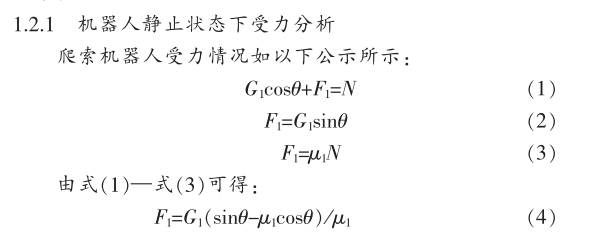
式中: F 1 —— — 由彈簧系統提供的附著力; G 1 —— — 單只滾輪承載的重力; θ —— — 纜索傾斜角度; μ 1 —— — 最大靜摩擦因數; N —— — 拉索對滾輪向上的反力
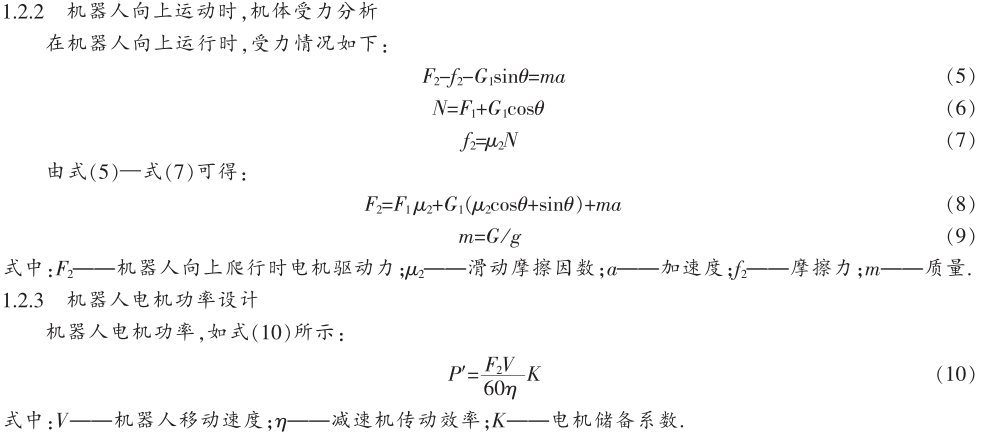
取 F 2 =250 N ,減速機傳動效率 η=0.8 ,電機儲備系數 K=1.25. 并考慮外觀檢測,視頻拍攝的穩定性,設置爬升最快速度 V max =12 m/min. 可以得到 P′=40 W. 參照設計所用設備參數,并考慮 3 倍 ~4 倍的安全系數,可以計算出最大電機功率 P max =160 W.
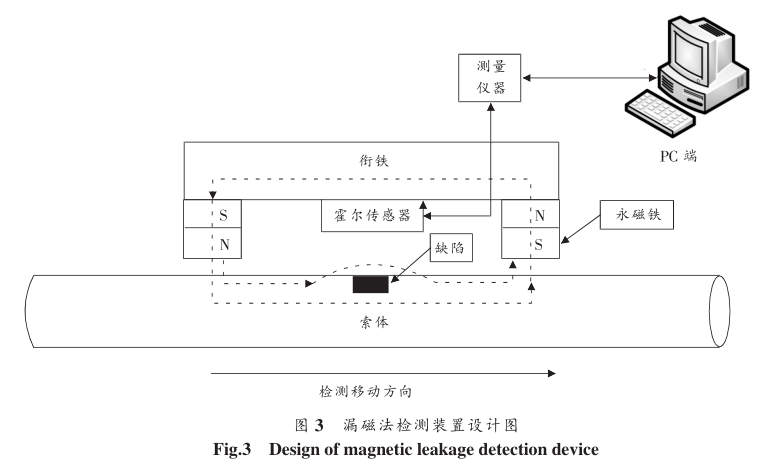
1.3 漏磁檢測裝置目前最常采用的拉索斷絲銹蝕檢測方法有磁滯伸縮導波法 [ 6 ] 、漏磁法 [ 7 ] . 本文所設計爬索機器人采用多套漏磁裝置實現對拉索索體內鋼絞線或平行鋼絲缺陷進行檢測 . 漏磁法檢測裝置設計圖如圖 3 所示,主要由銜鐵、永磁鐵、霍爾傳感器等部件構成 .
其測量原理為銜鐵、永磁鐵、被測拉索構成磁化回路,當勵磁裝置將拉索磁化到飽和狀態并相對拉索軸向掃描,當拉索存在斷絲或腐蝕等缺陷時,會導致拉索內部磁場發生變化,部分漏磁信號在空氣場中,霍爾傳感器即可檢測到相應的漏磁信號,通過對漏磁信號的檢測與數據分析可獲的拉索損傷量 [ 8 ] .
本文設計的單節勵磁傳感器用 2 只尼龍滾輪與拉索表面接觸,其直線移動由滾動完成,避免對 PE 造成損害 . 單節勵磁傳感器裝置示意圖如圖 4 所示。
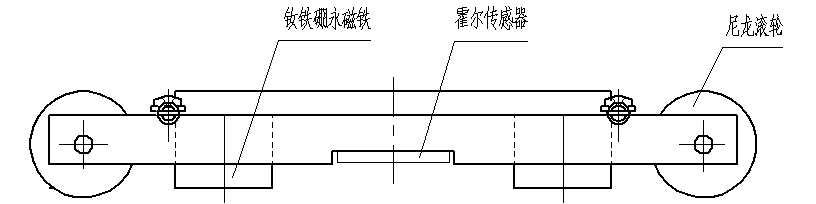
圖 4 單節勵磁傳感器示意圖
1.4 索力檢測裝置設計
目前通常采用的拉索索力檢測常用的方法有壓力環法、液壓千斤頂拉拔法、磁通量傳感法、以及振動頻率法等測量方法 [ 9 ] . 振動頻率法是一種間接測量索力的方法 . 依據索力與索的振動頻率之間存在對應關系的特點,在已知索長、拉索兩端的約束情況、分布質量等參數情況下,將高精度的加速度傳感器安裝在拉索上,采集拉索在環境振動激勵下的振動信號,即可獲得拉索的自振頻率,然后由索力與拉索自振頻率之間的關系計算出索力 [ 10 ] . 采集設備示意圖如圖 5 所示。

圖 5 振動頻率法采集設備示意圖

由于受到檢測條件的限制,通常的方法是將加速度傳感器固定在拉索預埋管上部某位置,但該位置高頻成分占主導,測試信號低階頻率不突出而高階諧振峰值很大,不利于低階頻率的獲取 . 加速度傳感器最為理想的安裝位置應是拉索的 L/4 或 3L/4 處, 因為這樣傳感器可以避開了支撐點和低階振型的反彎點,各階頻率對應的幅值比較明顯 [ 11 ] .
本文所采用的方法是將無線加速度傳感器搭載在爬索機器人上,通過機器人將傳感器爬升到拉索的 L/4 或 3L/4 處, 通過抱死裝置確保機器人和拉索處于一體的狀態 . 在機器人處于靜止狀態時再測量拉索索力 . 因機器人本身重量相對拉索重量來說很輕,故機器人自重對測量結果影響較小 .
1.5 控制系統設計
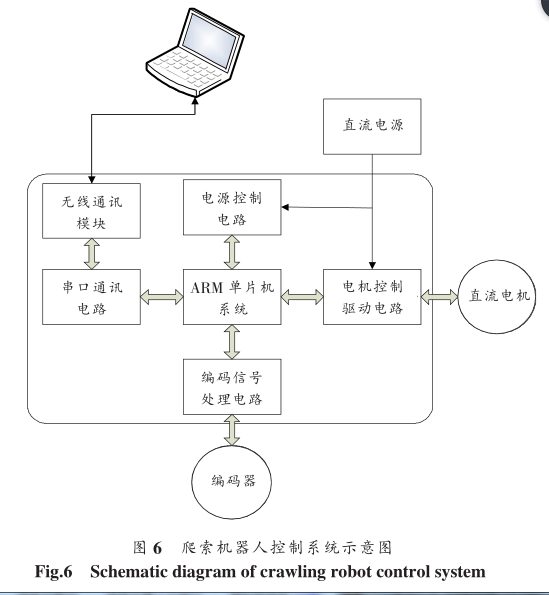
爬 索 機 器 人 控 制 系 統 采 用 ARM 內 核CORTEX 家族 STM32 系列 CPU 根核心, 控制系統框圖如圖 6 所示,橋面檢測控制臺電腦可以通過無線模塊與串口通訊電路與單片機系統進行通訊,傳送控制爬升機正向運轉、反向運轉指令,高、中、低三檔速度的控制指令,以及傳送行程位置、電池電壓和電流的實時數據 .整個系統按功能分為 5 個部分: 單片機系統、編碼信號處理電路、電機控制驅動電路、串口通訊電路、電源控制電路 . 如圖 6 所示 .
1.6 上位機軟件設計
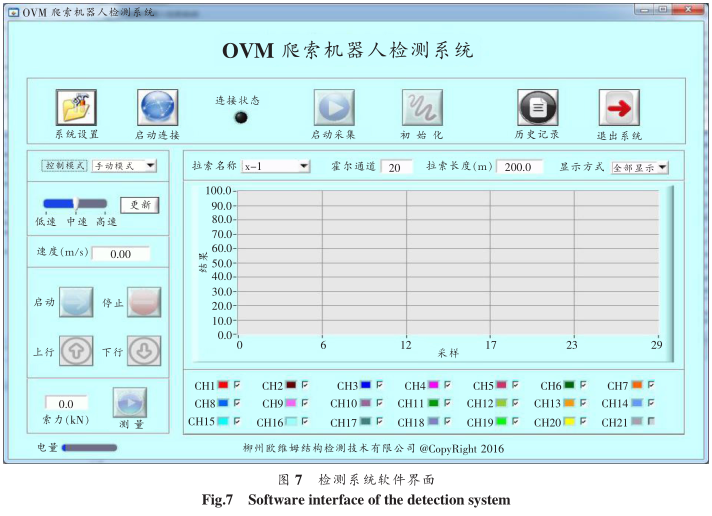
采用美國 NI 公司的 labwindows 平臺開發的套遠程檢測軟件,可以利用電腦終端無線采集索力、銹蝕斷絲數據,并通過 labwindows 平臺的 Vision Software 對采集到病害外觀影像資料進行分析處理 . 軟件界面如圖 7 所示。
2 試驗及工程應用
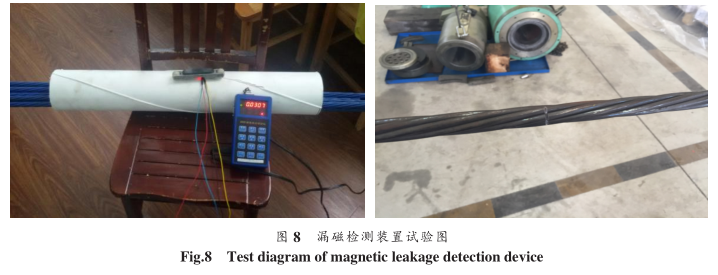
2.1 漏磁檢測裝置銹蝕斷絲檢測試驗
在柳州歐維姆實驗室對拉索斷絲銹蝕檢測裝置進行了試驗, 分別對完好拉索和有損傷的拉索進行了檢測 . 如圖 8 所示,通過實驗,能夠準確檢測出損傷部位 . 試驗驗證采用該方法對拉索斷絲銹蝕監測的可行 . 但拉索 PE 外護套導致磁信號有一定的衰減 . 理論上,隨著永磁鐵的磁場強度的增大,可以實現大規格索體的斷絲檢測 . 但考慮到斷絲銹蝕檢測裝置的自重,以及配套爬索機器人的使用 . 無源機器人的檢測方式超過 180 mm索徑的拉索就比較難實現;但可以采用有源的脈沖信號激勵的方式進行檢測 . 本文所設計機器人在拉索上最大運行速度為 12 m/min ,完全滿足了勵磁裝置對拉索結構的磁化時間,以及霍爾傳感器采集的響應時間。
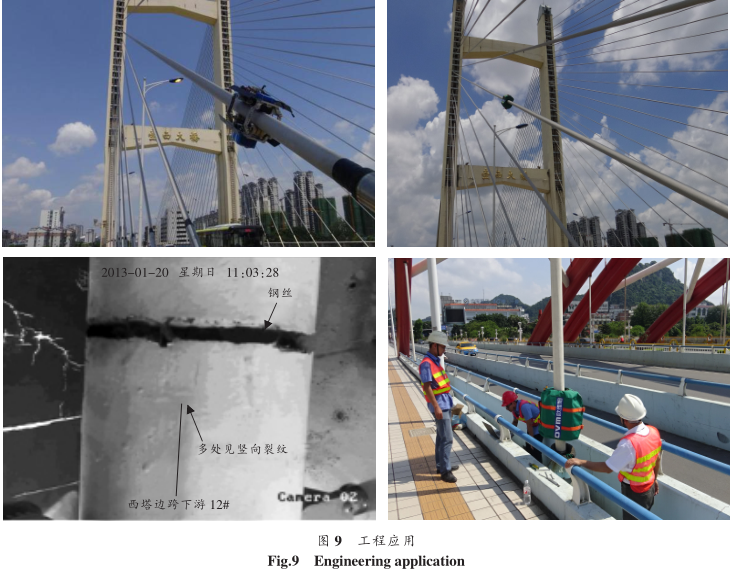
2.2 工程應用
研究所設計機器人分別在柳州文惠大橋、柳州壺西大橋、江西贛東大橋、桂林南洲大橋等橋進行了實際的試驗與檢測 . 通過試驗驗證,其工作速度最大可達 12 m/min ,平均的檢測速度為 10 m/min. 最大承載能力為 120 kg ,爬升斜度在 0 °~90 ° 范圍內可調,最大續航 2 000 m. 最遠無線傳輸距離為 500 m. 如圖 9 所示。
3 結論
本文設計的爬索機器人經過廠內和現場試驗,得出了以下結論:
1 )采用輕型碳纖維材料、直流電機和減速齒輪箱、鋰電池的輕型構建的爬索機器人極大降低了自重,提高了續航能力,實現了在不外接電源的情況下,安全、快速、便捷的檢測拉索病害 .
2 )采用漏磁法檢測拉索斷絲銹蝕的方法,能夠實現小直徑的拉索檢測,對大直徑的橋梁拉索,受永磁鐵自重的影響,不能完全對索體進行磁化,不能精準的檢測 . 后續可研究以脈沖的磁化方式進行斷絲銹蝕測量 .
3 )通過爬索機器人攜帶無線加速度傳感器到拉索自由段中間部位后再測量拉索索力,該方法比原先在拉索預埋管上部安裝傳感器測量索力更為精準 .
4 )在機器人前部搭載高清攝像頭也可以實現對橋塔和拉索連接部位外觀的檢測 .
5 )鋼絞線拉索外部有環氧、 PE 和油脂等四重防護,且鋼絞線之間有空氣間隙,檢測時會比鋼絲成品拉索誤差更大 .
參考文獻
[ 1 ] 吳振, 龍躍, 章陳瀑 . 持荷狀態下鋼絞線腐蝕及性能退化研究[ J ] . 廣西工學院學報, 2011 , 22 ( 1 ): 23-26.
[ 2 ] 楊少軍 . 橋梁拉索體系損傷的檢測和監測方法[ J ] . 公路交通技術, 2005 ( 3 ): 130-134.
[ 3 ] 羅均, 呂恬生, 張家梁,等 . 纜索維護機器人系統的研制[ J ] . 上海交通大學學報, 2000 , 34 ( 3 ): 360-362.
[ 4 ] 徐豐羽, 王興松, 許家林 . 雙邊輪式斜拉橋懸索檢測機器人設計與分析[ J ] . 東南大學學報(英文版), 2009 , 25 ( 1 ): 41-46.
[ 5 ] 汪正興, 王波, 王翔,等 . 橋梁纜索的檢測系統: 103194967A [ P ] . 2013-07-10.
[ 6 ] 鄒易清, 武新軍, 蔣立軍,等 . 拉索斷絲磁致伸縮導波檢測信號特性實驗研究[ J ] . 廣西科技大學學報, 2017 , 28 ( 2 ): 85-88.
[ 7 ] 丁忠平, 康宜華 . 無損檢測中的漏磁法原理與實踐[ J ] . 電測與儀表, 1995 ( 6 ): 15-18.
[ 8 ] 楊叔子, 康宜華 . 鋼絲繩斷絲定量檢測原理與技術[ M ] . 北京:國防工業出版社, 1995.
[ 9 ] 王曉琳,李東平,鄧年春,等 . 邊坡預應力錨索索力檢測方法比較研究[ J ] . 科技創新導報, 2015 ( 24 ): 100-101.
[ 10 ] 王建飛 . 拱橋吊桿索力的振動法測量[ D ] . 哈爾濱:哈爾濱工業大學, 2012.
[ 11 ] 韓宗澤 . 頻率法測量索力的研究[ J ] . 天津建設科技, 2013 , 23 ( 2 ): 57-59.
免責聲明:本網站所轉載的文字、圖片與視頻資料版權歸原創作者所有,如果涉及侵權,請第一時間聯系本網刪除。
相關文章

官方微信
《中國腐蝕與防護網電子期刊》征訂啟事
- 投稿聯系:編輯部
- 電話:010-62313558-806
- 郵箱:fsfhzy666@163.com
- 中國腐蝕與防護網官方QQ群:140808414
點擊排行
PPT新聞

“海洋金屬”——鈦合金在艦船的
點擊數:5768

腐蝕與“海上絲綢之路”
點擊數:4763